Introduction
Almost every electronic device/component nowadays has to be able to communicate to other devices, components, or outside world over some I/O link. Such communication is implemented using various communication protocols.
At first glance the implementation of communication protocols seems to be quite an easy and straightforward process. Every message has predefined fields, that need to be serialised and deserialised according to the protocol specification. Every serialised message is wrapped in a transport data to ensure a safe delivery to the other end over some I/O link. However, there are multiple pitfalls and wrong design choices that can lead to a cumbersome, bloated, and difficult to maintain source code. It becomes especially noticable when the development of the product progresses, and initially developed small communication protocol grows to contain many more messages than initially planned. Adding a new message in such state can become a tedious, time consuming and error-prone process.
This book suggests flexible, generic and easily extendable design architecture, which allows creation of a generic C++(11) library. This library may be used later on to implement many binary communication protocols using simple declarative statements of class and type definitions.
As stated in the book’s title, the main focus of this book is a development for embedded systems (including bare-metal ones). There is no use of RTTI and/or exceptions. I also make a significant effort to minimise usage of dynamic memory allocation and provide means to exclude it altogether if needed. All the presented techniques and design choices are also applicable to non-embedded systems which don’t have limitations of the latter.
This work is licensed under the Creative Commons Attribution-NonCommercial-ShareAlike 4.0 International License.

Code Generation vs C++ Library
The implementation of the binary communication protocols can be a tedious, time consuming and error-prone process. Therefore, there is a growing tendency among developers to use third party code generators for data (de)serialisation. Usually such tools receive description of the protocol data layout in separate source file(s) with a custom grammar, and generate appropriate (de)serialisation code and necessary abstractions to access the data.
There are so many of them: ProtoBuf, Cap’n Proto, MessagePack, Thrift, Kaitai Struct, Protlr, you-name-it… All of these tools are capable of generating C++ code. However, the generated code quite often is not good enough to be used in embedded systems, especially bare-metal ones. Either the produced C++ code or the tool itself has at least one of the following limitations:
-
Inability to specify binary data layout. Many of the tools use their own serialisation format without an ability to provide custom one. It makes them impossible to use to implement already defined and used binary communication protocol.
-
Inability to customise underlying types. Most (or all) of the mentioned code generating tools, which do allow customisation of binary data layout, choose to use std::string for string fields and/or std::vector for lists, as well as (de)serialisation code is generated to use standard streams (std::istream and std::ostream). Even if such ability is provided, it is usually "global" one and do not allow substitution of types only for specific messages / fields.
-
Small number of supported data fields or limited number of their serialisation options. For example, strings can be serialised by being prefixed with their size (which in turn can have different lengths), or being terminated with
'\0', or having fixed size with'\0'padding if the string is too short. There are protocols that use all three variants of strings. -
Poor or weak description grammar without an ability to support conditional (de)serialisation. For example, having a value (such as single bit in some bitmask field) which determines whether some other optional field exists or not.
-
Lack of polymorphic interface to allow implementation of the common code for all the defined messages.
-
When polymorphic interface with virtual functions is provided, there is no way to exclude generation of unnecessary virtual functions for a particular embedded application. All the provided virtual functions will probably remain in the final image even if they are not used.
-
Lack of efficient built-in way of dispatching the deserialised message object into its appropriate handling function. There is a need to provide a separate dispatch table or map from message ID to some callback function or object.
-
Lack of ability to override or complement the generated serialisation code with the manually written one where extra logic is required.
The generalisation is hard. Especially when the main focus of the tools' developers is on supporting as many target programming languages as possible, rather than allowing multiple configuration variants of a single specific language. Currently there is no universal fit all needs code generation solution that can handle all the existing and being used binary communication protocols. As the result many embedded C++ developers still have to manually implement them rather than relying on the existing tools for code generation.
There is still a way to help them in such endeavour by developing a C++ library which will provide highly configurable classes, usage of which will allow to implement required functionality using simple declarative statements of types and classes definitions (instead of implementing everything from scratch). That’s what this book is all about.
Thanks to new language features introduced in C++11 standard and multiple meta-programming techniques, it becomes possible to write simple, clear, but highly configurable code, which can be used in multiple applications: embedded bare-metal with limited resources, Linux based platform, even the GUI analysis tools. They all can use the same single implementation of the protocol, but each generate the code suitable for the developed platform / application. The C++ compiler itself serves as code generation tool.
Main Challenges
There are multiple challenges that need to be considered prior to starting implementation of any communication protocol. It will guide us into the right direction when designing an overall architecture.
Code Boilerplating
The communication protocols are notorious for creating a boilerplate code. As a whole, most of them are very similar, they define various messages with their internal fields, define serialisation rules for all the fields and wrap them in some kind of transport information to ensure safe delivery of the message over the I/O link.
When serialising any message, all its fields must be serialised in predefined order. There is also very limited number of field types that is usually used:
-
numeric values - may differ in sizes, being signed or unsigned, have a different ranges of valid values, etc…
-
enumeration values - similar to numeric values, but have a very limited range of valid values, and
enumtype is usually used to operate the values, just for convenience. -
bitmask values - similar to numeric values, but each bit has a different meaning.
-
strings - may differ in the way they are serialised (zero-suffixed or size-prefixed).
-
lists of raw bytes or other fields - may have fixed (predefined) or variable size.
-
bundles of multiple fields - may be used as a single element of a list.
-
bitfields - similar to bundles, but internal member fields have a length of several bits (instead of bytes).
The number of field types is quite small, but the number of different nuances when serialising or using a single field is much bigger. It is very difficult to generalise such use and most developers don’t even bother to come up with something generic. As the result they experience a deja-vu feeling every time they have to implement a new message or add a new field into an existing message. There is a strong feeling that the code is being duplicated, but there is no obvious and/or easy way to minimise it.
Protocol Extension Effort
Keep in mind the development effort that will be required to introduce
a new message to the protocol being implemented. The number of different places
in the existing code base, that need to be modified/updated, must obviously be
kept at a minimum. Ideally no more than 2 or 3, but most implementations I’ve
seen significantly bypass these numbers. In many cases developers forget
to introduce compile time checks, such as static_assert statements to
verify that all the required places in the code have been updated after new
message was introduced. Failure to do so results in unexpected bugs and extended
development effort to find and fix them.
What about extending an existing message by adding an extra field at the end or even in the middle? How easy is it going to be and how much development time needs to be spent? How error-prone is it going to be?
Inter-System Reuse
Quite often the implementation of the same protocol needs to be reused between different systems. For example, some embedded sensor device needs to communicate its data to a management server (both implemented in C++) and it would be wise to share the same implementation of the communication protocol on both ends. However, managing the I/O link and usage of various data structures may be different for both of them. Making the implementation of the communication protocol system dependent may make such reuse impossible.
Sometimes different teams are responsible for implementation of different systems, that use the same communication protocol but that reside on different ends of the communication link. Usually such teams make an upfront decision not to share the implementation of the communication protocol they use. Even in this case, making the implementation system dependent is a bad idea. It may be necessary to develop some additional protocol testing tools because the other team has not completed the development of their product in time.
Intra-System Reuse
It is not uncommon for various embedded systems to add extra I/O interfaces in the next generations of the device hardware, which can be used to communicate with other devices using the same protocol. For example, the first generation of some embedded sensor communicates its data over TCP/IP network link to some data management server. The second generation adds a Bluetooth interface that allows to communicate the same data to a tablet of the person working nearby. The application level messages, used to communicate the data, are the same for the server and the tablet. However, the transport wrapping information for TCP/IP and Bluetooth will obviously differ. If initial implementation of the communication protocol hasn’t properly separated the application level messages and wrapping transport data, it’s going to be difficult, time consuming and error-prone to introduce a new communication channel via Bluetooth I/O link.
Goal
Our primary goal is to come up with an architecture that:
-
does NOT depend or make any assumptions on the system it is running on.
-
does NOT make any hard-coded assumptions on the resources available to the system, such as dynamic memory allocation, exceptions, RTTI, etc…
-
has an efficient way to parse the incoming message and dispatch it to an appropriate handler. The runtime complexity shouldn’t exceed
O(log(n)), wherenis a total number of messages in the protocol. -
provides quick, easy and straightforward way of adding new messages to the protocol.
-
has as little connection as possible between the application level messages and wrapping transport data, which allows easy substitution of the latter if need arises.
Our ultimate goal would be creation of a generic C++(11) library, that can assist in implementation of many binary communication protocols. Such library will provide all the necessary types and classes, usage of which will make the implementation of the required communication protocol easy, quick and straightforward process of using simple declarative statements. It will significantly reduce the amount of boilerplate code and boost the development process.
Audience
The primary intended audience of this book is intermediate to professional C++ developers who feel comfortable with templates and are not afraid of template meta-programming.
In order to achieve all our goals of platform and runtime environment independence, there is little other choice but to use templates with significant amount of meta-programming techniques in order to allow compiler to generate the best code suitable for the system being developed.
Code Examples
This book contains multiple C++ code examples and snippets. Their main purpose is to demonstrate ideas expressed in the book as well as guide developers into the right direction. There are no huge code listings (nobody reads them anyway) and no detailed explanations for every line of code. I expect the readers to understand the demonstrated idea and take it to the next level themselves.
In order to demonstrate the idea I rarely use production level code, at least not up front. I will start with something simple and non-generic and gradually increase the complexity and/or genericity.
I’m also a huge fan of Non-Virtual Interface (NVI) Idiom and often my examples will look like this:
class SomeInterface
{
public:
void someFunction()
{
someFunctionImpl();
}
protected:
virtual void someFunctionImpl() = 0;
};
class Derived : public SomeInterface
{
protected:
virtual void someFunctionImpl() override {...}
};The non virtual interface function is supposed to check pre- and post-conditions of the polymorphic invocation if such exist as well as execute some common code if such is required. I tend to write the code similar to above even when there are no pre- and post-conditions to check and no common code to execute. Please don’t be surprised when seeing such constructs throughout the book.
Final Outcome
The ideas summarised in this book are not just theoretical ones. There is ready to use implementation called COMMS Library. It provides all the necessary types and classes to make the definition of the custom messages as well as wrapping transport data fields to be simple declarative statements of type and class definitions, which specify WHAT needs to be implemented. The library internals handle the HOW part.
NOTE, that the ideas expressed in this book are very basic ones, the mentioned COMMS Library is much more advanced than the examples provided in this book. It is recommended to read the library’s tutorial and, as an excersice, to think about ways how the provided examples can be extended to support the described features.
The COMMS Library is a part of a bigger project called CommsChampion. It contains generic plug-in based tools for visualisation and analysis of the communication protocols, which have been implemented using the provided library.
Contribution
If you have any suggestions, requests, bug fixes, spelling mistakes fixes, or maybe you feel that some things are not explained properly, please feel free to e-mail me to arobenko@gmail.com.
Reading Offline
The source code of this book is hosted on github and both PDF and HTML versions of this book can be downloaded from the release_artifacts.
Message
Most C++ developers intuitively choose to express every independent message as a separate class, which inherit from a common interface.
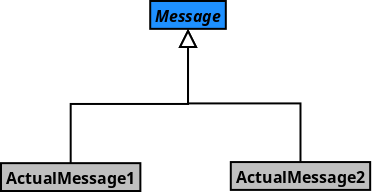
This is a step to the right direction. It becomes easy and convenient to write a common code that suites all possible messages:
class Message
{
public:
void write(...) const {
writeImpl(...);
}
...
protected:
// Implements writing to a buffer functionality
virtual void writeImpl(...) const = 0;
};
class ActualMessage1 : public Message
{
...
protected:
virtual void writeImpl(...) const override {...};
};
class ActualMessage2 : public Message
{
...
protected:
virtual void writeImpl(...) const override {...};
};
// Send any message
void sendMessage(const Message& msg)
{
...
msg.write(...); // write message to a buffer
...// send buffer contents over I/O link;
}Reading and Writing
When new raw data bytes are received over some I/O link, they need to be deserialised into the custom message object, then dispatched to an appropriate handling function. When continuing message as an object concept, expressed in previous chapter, it becomes convenient to make a reading/writing functionality a responsibility of the message object itself.
class Message
{
public:
ErrorStatus read(...) {
return readImpl(...);
}
ErrorStatus write(...) const {
return writeImpl(...);
}
...
protected:
// Implements reading from the buffer functionality
virtual ErrorStatus readImpl(...) = 0;
// Implements writing to a buffer functionality
virtual ErrorStatus writeImpl(...) const = 0;
};
class ActualMessage1 : public Message
{
...
protected:
virtual ErrorStatus readImpl(...) override {...};
virtual ErrorStatus writeImpl(...) const override {...};
};
class ActualMessage2 : public Message
{
...
protected:
virtual ErrorStatus readImpl(...) override {...};
virtual ErrorStatus writeImpl(...) const override {...};
};There is obviously a need to know success/failure status of the read/write operation.
The ErrorStatus return value may be defined for example like this:
enum class ErrorStatus
{
Success,
NotEnoughData,
BufferOverflow,
InvalidMsgData,
...
};Let’s assume, that at the stage of parsing transport wrapping information, the ID of the message was retrieved and appropriate actual message object was created in an efficient way. This whole process will be described later in the Transport chapter.
Once the appropriate message object was created and returned in some kind of
smart pointer, just call the read(…) member function of the message object:
using MsgPtr = std::unique_ptr<Message>;
MsgPtr msg = processTransportData(...)
auto es = msg.read(...); // read message payload
if (es != ErrorStatus::Success) {
... // handle error
}Data Structures Independence
One of our goals was to make the implementation of the communication protocol to be system independent. In order to make the code as generic as possible we have to eliminate any dependency on specific data structures, where the incoming raw bytes are stored before being processed, as well as outgoing data before being sent out.
The best way to achieve such independence is to use iterators instead of specific data structures and make it a responsibility of the caller to maintain appropriate buffers:
template <typename TReadIter, typename TWriteIter>
class Message
{
public:
using ReadIterator = TReadIter;
using WriteIterator = TWriteIter;
ErrorStatus read(ReadIterator& iter, std::size_t len) {
return readImpl(iter, len);
}
ErrorStatus write(WriteIterator& iter, std::size_t len) const {
return writeImpl(iter, len);
}
...
protected:
// Implements reading from the buffer functionality
virtual ErrorStatus readImpl(ReadIterator& iter, std::size_t len) = 0;
// Implements writing to a buffer functionality
virtual ErrorStatus writeImpl(WriteIterator& iter, std::size_t len) const = 0;
};
template <typename TReadIter, typename TWriteIter>
class ActualMessage1 : public Message<TReadIter, TWriteIter>
{
using Base = Message<TReadIter, TWriteIter>;
public:
using Base::ReadIterator;
using Base::WriteIterator;
...
protected:
virtual ErrorStatus readImpl(ReadIterator& iter, std::size_t len) override {...};
virtual ErrorStatus writeImpl(WriteIterator& iter, std::size_t len) const override {...};
};Please note, that iterators are passed by reference, which allows the increment and assignment operations required to implement serialisation/deserialisation functionality.
Also note, that the same implementation of the read/write operations can be used
in any system with any restrictions. For example, the bare-metal embedded system
cannot use dynamic memory allocation and must serialise the outgoing messages
into a static array, which forces the definition of the write iterator to be
std::uint8_t*.
using EmbReadIter = const std::uint8_t*;
using EmbWriteIter = std::uint8_t*;
using EmbMessage = Message<EmbReadIter, EmbWriteIter>
using EmbActualMessage1 = ActualMessage1<EmbReadIter, EmbWriteIter>
using EmbActualMessage2 = ActualMessage2<EmbReadIter, EmbWriteIter>
std::array<std::uint8_t, 1024> outBuf;
EmbWriteIter iter = &outBuf[0];
EmbActualMessage1 msg;
msg.write(iter, outBuf.size());
auto writtenCount = std::distance(&outBuf[0], iter); // iter was incrementedThe Linux server system which resides on the other end of
the I/O link doesn’t have such limitation and uses std::vector<std::uint8_t>
to store outgoing serialised messages. The generic and data structures independent
implementation above makes it possible to be reused:
using LinReadIter = const std::uint8_t*;
using LinWriteIter = std::back_insert_iterator<std::vector<std::uint8_t> >;
using LinMessage = Message<LinReadIter, LinWriteIter>
using LinActualMessage1 = ActualMessage1<LinReadIter, LinWriteIter>
using LinActualMessage2 = ActualMessage2<LinReadIter, LinWriteIter>
std::vector<std::uint8_t> outBuf;
LinWriteIter iter = std::back_inserter(outBuf);
LinActualMessage1 msg;
msg.write(iter, outBuf.max_size());
auto writtenCount = outBuf.size();Data Serialisation
The readImpl() and writeImpl() member functions of the actual message
class are supposed to properly serialise and deserialise message fields. It is
a good idea to provide some common serialisation functions accessible by the
actual message classes.
template <typename TReadIter, typename TWriteIter>
class Message
{
protected:
template <typename T>
static T readData(ReadIterator& iter) {...}
template <typename T>
static void writeData(T value, WriteIterator& iter) {...}
};The readData() and writeData() static member functions above are responsible
to implement the serialisation and deserialisation of the values using the
right endian.
Depending on a communication protocol there may be a need to serialise only part
of the value. For example, some field of communication protocol is defined
to have only 3 bytes. In this case the value will probably be stored in a
variable of std::uint32_t type. There must be similar set of functions,
but with additional template parameter that specifies how many bytes to read/write:
template <typename TReadIter, typename TWriteIter>
class Message
{
protected:
template <std::size_t TSize, typename T>
static T readData(ReadIterator& iter) {...}
template <std::size_t TSize, typename T>
static void writeData(T value, WriteIterator& iter) {...}
};CAUTION: The interface described above is very easy and convenient to use and quite easy to implement using straightforward approach. However, any variation of template parameters create an instantiation of new binary code, which may create significant code bloat if not used carefully. Consider the following:
-
Read/write of signed vs unsigned integer values. The serialisation/deserialisation code is identical for both cases, but won’t be considered as such when instantiating the functions. To optimise this case, there is a need to implement read/write operations only for unsigned value, while the “signed” functions become wrappers around the former. Don’t forget a sign extension operation when retrieving partial signed value.
-
The read/write operations are more or less the same for any length of the values, i.e of any types: (unsigned) char, (unsigned) short, (unsigned) int, etc… To optimise this case, there is a need for internal function that receives length of serialised value as a run time parameter, while the functions described above are mere wrappers around it.
-
Usage of the iterators also require caution. For example reading values may be performed using regular
iteratoras well asconst_iterator, i.e. iterator pointing toconstvalues. These are two different iterator types that will duplicate the “read” functionality if both of them are used.
All the consideration points stated above require quite complex implementation of the serialisation/deserialisation functionality with multiple levels of abstraction which is beyond the scope of this book. It would be a nice exercise to try and implement them yourself. You may take a look at util/access.h file in the COMMS Library of the comms_champion project for reference.
Dispatching and Handling
When a new message arrives, its appropriate object is created, and the contents
are deserialised using read() member function, described in previous chapter.
It is time to dispatch it to an appropriate handling function. Many developers
use the switch statement or even a sequence of dynamic_cast-s to identify
the real type of the message object and call appropriate handling function.
When it comes to switch statements modern compilers are capable of generating
efficient dispatch tables. However, the code itself is manual and boilerplate.
There is a much better way of doing a dispatch
operation by using a C++ ability to differentiate between functions with the
same name but with different parameter types. It is called
Double Dispatch Idiom.
Let’s assume we have a handling class Handler that is capable of handling
all possible messages:
class Handler
{
public:
void handle(ActualMessage1& msg);
void handle(ActualMessage2& msg);
...
}Then the definition of the messages may look like this:
class Message
{
public:
void dispatch(Handler& handler)
{
dispatchImpl(handler);
}
...
protected:
virtual void dispatchImpl(Handler& handler) = 0;
};
class ActualMessage1 : public Message
{
...
protected:
virtual void dispatchImpl(Handler& handler) override
{
handler.handle(*this); // invokes handle(ActualMessage1&);
}
};
class ActualMessage2 : public Message
{
...
protected:
virtual void dispatchImpl(Handler& handler) override
{
handler.handle(*this); // invokes handle(ActualMessage2&);
}
};Then the following code will invoke appropriate handling function
in the Handler object:
using MsgPtr = std::unique_ptr<Message>;
MsgPtr msg = ... // any custom message object;
Handler handler;
msg->dispatch(handler); // will invoke right handling function.Please note, that the Message interface class doesn’t require the definition
of the Handler class, the forward declaration
of the latter is enough. The Handler also doesn’t require
the definitions of all the actual messages being available, forward declarations of all
the message classes will suffice. Only the implementation part of the Handler
class will require knowledge about the interface of the messages being handled.
However, the public interface of the Handler class must be known when
compiling dispatchImpl() member function of any ActualMessageX class.
Eliminating Boilerplate Code
You may also notice that the body of all dispatchImpl() member functions in
all the ActualMessageX classes is going to be the same:
virtual void dispatchImpl(Handler& handler) override
{
handler.handle(*this);
}The problem is that *this expression in every function evaluates to the
object of different type.
The apperent code duplication may be eliminated using Curiously Recurring Template Pattern idiom.
class Message
{
public:
void dispatch(Handler& handler)
{
dispatchImpl(handler);
}
...
protected:
virtual void dispatchImpl(Handler& handler) = 0;
};
template <typename TDerived>
class MessageBase : public Message
{
protected:
virtual void dispatchImpl(Handler& handler) override
{
handler.handle(static_cast<Derived&>(*this));
}
}
class ActualMessage1 : public MessageBase<ActualMessage1>
{
...
};
class ActualMessage2 : public MessageBase<ActualMessage2>
{
...
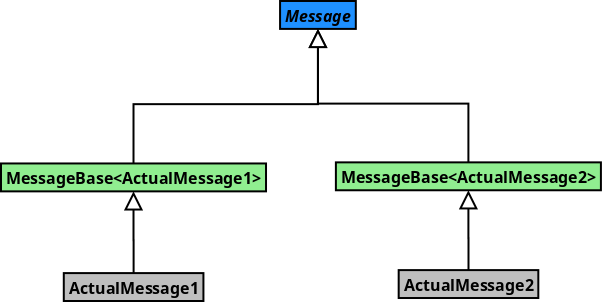
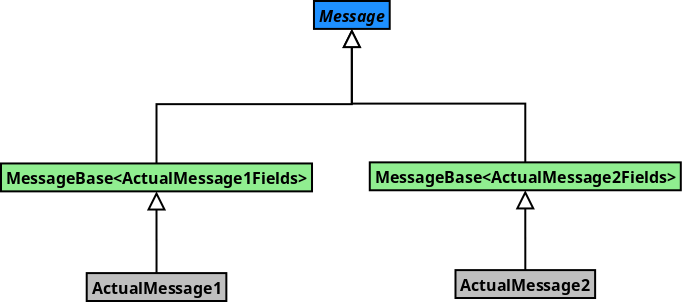
};Please note, that ActualMessageX provide their own type as a template
parameter to their base class MessageBase and do not require to implement
dispatchImpl() any more. The class hierarchy looks like this:
Handling Limited Number of Messages
What if there is a need to handle only limited number of messages, all the rest
just need to be ignored. Let’s assume the protocol defines 10 messages:
ActualMessage1, ActualMessage2, …, ActualMessage10. The messages that
need to be handled are just ActualMessage2 and ActualMessage5, all the rest
ignored. Then the definition of the Handler class will look like this:
class Handler
{
public:
void handle(ActualMessage2& msg) {...}
void handle(ActualMessage5& msg) {...}
void handle(Message& msg) {} // empty body
}In this case, when compiling dispatchImpl() member function of ActualMessage2
and ActualMessage5, the compiler will generate invocation code for appropriate
handle() function. For the rest of the message classes, the best matching option
will be invocation of handle(Message&).
Polymorphic Handling
There may be a need to have multiple handlers for the same set of messages. It
can easily be achieved by making the Handler an abstract interface class and
defining its handle() member functions as virtual.
class Handler
{
public:
virtual void handle(ActualMessage1& msg) = 0;
virtual void handle(ActualMessage2& msg) = 0;
...
}
class ActualHandler1 : public Handler
{
public:
virtual void handle(ActualMessage1& msg) override;
virtual void handle(ActualMessage2& msg) override;
...
}
class ActualHandler2 : public Handler
{
public:
virtual void handle(ActualMessage1& msg) override;
virtual void handle(ActualMessage2& msg) override;
...
}No other changes to dispatch functionality is required:
using MsgPtr = std::unique_ptr<Message>;
MsgPtr msg = ... // any custom message object;
AtualHandler1 handler1;
AtualHandler2 handler2;
// Works for any handler
msg->dispatch(handler1);
msg->dispatch(handler2);Generic Handler
Now it’s time to think about the required future effort of extending the
handling functionality when new messages are added to the protocol and their
respective classes are implemented. It is especially relevant when
Polymorphic Handling is involved. There is a need
to introduce new virtual handle(…) member function for every new message
that is being added.
There is a way to delegate this job to the compiler using template specialisation.
Let’s assume, that all the message types, which need
to be handled, are bundled into a simple declarative statement of std::tuple
definition:
using AllMessages = std::tuple<
ActualMessage1,
ActualMessage2,
...
>;Then the definition of the generic handling class will be as following:
// TCommon is common interface class for all the messages
// TAll is all the message types, that need to be handled, bundled in std::tuple
template <typename TCommon, typename TAll>
class GenericHandler;
template <typename TCommon, typename TFirst, typename... TRest>
class GenericHandler<TCommon, std::tuple<TFirst, TRest...> > :
public GenericHandler<TCommon, std::tuple<TRest...> >
{
using Base = GenericHandler<TCommon, std::tuple<TRest...> >;
public:
using Base::handle; // Don't hide all handle() functions from base classes
virtual void handle(TFirst& msg)
{
// By default call handle(TCommon&)
this->handle(static_cast<TCommon&>(msg));
}
};
template <typename TCommon>
class GenericHandler<TCommon, std::tuple<> >
{
public:
virtual ~GenericHandler() {}
virtual void handle(TCommon&)
{
// Nothing to do
}
};The code above generates virtual handle(TCommon&) function for the common
interface class, which does nothing by default. It also creates a separate
virtual handle(…) function for every message type provided in TAll
tuple. Every such function upcasts the message type to its interface class
TCommon and invokes the handle(TCommon&).
As the result simple declaration of
class Handler : public GenericHandler<Message, AllMessages> {};is equivalent to having the following class defined:
class Handler
{
public:
virtual void handle(ActualMessage1& msg)
{
this->handle(static_cast<Message&>(msg));
}
virtual void handle(ActualMessage2& msg)
{
this->handle(static_cast<Message&>(msg));
}
...
virtual void handle(Message& msg)
{
// do nothing
}From now on, when new message class is defined, just add it to the AllMessages
tuple definition. If there is a need to override the default behaviour for
specific message, override the appropriate message in the handling class:
class ActualHandler1 : public Handler
{
public:
virtual void handle(ActualMessage2& msg) override
{
std::cout << "Handling ActualMessage2" << std::endl;
}
virtual void handle(Message& msg) override
{
std::cout << "Common handling function is invoked" << std::endl;
}
}REMARK: Remember that the Handler class was forward declared when
defining the Message interface class? Usually it looks like this:
class Handler;
class Message
{
public:
void dispatch(Handler& handler) {...}
};Note, that Handler is declared to be a class, which prevents it from being
a simple typedef of GenericHandler. Usage of typedef will cause compilation
to fail.
CAUTION: The implementation of the GenericHandler presented above creates
a chain of N + 1 inheritances for N messages defined in AllMessages
tuple. Every new class adds a single virtual function. Many compilers will
create a separate vtable for every such class. The size of every new vtable
is greater by one entry than a previous one. Depending on total number of
messages in that tuple, the code size may grow quite big due to growing number
of `vtable`s generated by the compiler. It may be not suitable for some
systems, especially bare-metal. It is possible to
significantly reduce number of inheritances using more template specialisation
classes. Below is an example of adding up to 3 virtual functions in a single
class at once. You may easily extend the example to say 10 functions or more.
template <typename TCommon, typename TAll>
class GenericHandler;
template <typename TCommon, typename TFirst, TSecond, TThird, typename... TRest>
class GenericHandler<TCommon, std::tuple<TFirst, TSecond, TThird, TRest...> > :
public GenericHandler<TCommon, std::tuple<TRest...> >
{
using Base = GenericHandler<TCommon, std::tuple<TRest...> >;
public:
using Base::handle;
virtual void handle(TFirst& msg)
{
this->handle(static_cast<TCommon&>(msg));
}
virtual void handle(TSecond& msg)
{
this->handle(static_cast<TCommon&>(msg));
}
virtual void handle(TThird& msg)
{
this->handle(static_cast<TCommon&>(msg));
}
};
template <typename TCommon, typename TFirst, typename TSecond>
class GenericHandler<TCommon, std::tuple<TFirst, TSecond> >
{
public:
virtual ~GenericHandler() {}
virtual void handle(TFirst& msg)
{
this->handle(static_cast<TCommon&>(msg));
}
virtual void handle(TSecond& msg)
{
this->handle(static_cast<TCommon&>(msg));
}
virtual void handle(TCommon&)
{
// Nothing to do
}
};
template <typename TCommon, typename TFirst>
class GenericHandler<TCommon, std::tuple<TFirst> >
{
public:
virtual ~GenericHandler() {}
virtual void handle(TFirst& msg)
{
this->handle(static_cast<TCommon&>(msg));
}
virtual void handle(TCommon&)
{
// Nothing to do
}
};
template <typename TCommon>
class GenericHandler<TCommon, std::tuple<> >
{
public:
virtual ~GenericHandler() {}
virtual void handle(TCommon&)
{
// Nothing to do
}
};Extending Interface
Let’s assume the protocol was initially developed for some embedded system which required very basic message interface of only read / write / dispatch.
The interface class definition was defined allowing iterators to be specified elsewhere:
class Handler;
template <typename TReadIterator, typename TWriteIterator>
class Message
{
public:
using ReadIterator = TReadIterator;
using WriteIterator = TWriteIterator;
// Read the message
ErrorStatus read(ReadIterator& iter, std::size_t len)
{
return readImpl(iter, len);
}
// Write the message
ErrorStatus write(WriteIterator& iter, std::size_t len) const
{
return writeImpl(iter, len);
}
// Dispatch to handler
void dispatch(Handler& handler)
{
dispatchImpl(handler);
}
protected:
virtual ErrorStatus readImpl(ReadIterator& iter, std::size_t len) = 0;
virtual ErrorStatus writeImpl(WriteIterator& iter, std::size_t len) const = 0;
virtual void dispatchImpl(Handler& handler) = 0;
};The intermediate class allowing common implementation of dispatchImpl():
template <typename TReadIterator, typename TWriteIterator, typename TDerived>
class MessageBase : public Message<TReadIterator, TWriteIterator>
{
protected:
virtual void dispatchImpl(Handler& handler) override {...};
};And the actual message classes:
template <typename TReadIterator, typename TWriteIterator>
class ActualMessage1 : public MessageBase<TReadIterator, TWriteIterator, ActualMessage1>
{
...
};
template <typename TReadIterator, typename TWriteIterator>
class ActualMessage2 : public MessageBase<TReadIterator, TWriteIterator, ActualMessage2>
{
...
};Then, after a while a new application needs to be developed, which monitors the I/O link and dumps all the message traffic into standard output and/or *.csv file. This application requires knowledge about names of the messages, and it would be convenient to add an appropriate function into the common message interface and reuse the existing implementation. There is one problem though, the code of the protocol is already written and used in the embedded system, which does not require this additional functionality and its binary code should not contain these extra functions.
One of the solutions can be to use preprocessor:
template <...>
class Message
{
public:
#ifdef HAS_NAME
const char* name() const
{
return nameImpl();
}
#endif
protected:
#ifdef HAS_NAME
virtual const char* nameImpl() const = 0;
#endif
};
template <...>
class MessageBase : public Message<...> {...};
template <>
class ActualMessage1 : public MessageBase<...>
{
protected:
#ifdef HAS_NAME
virtual const char* nameImpl() const
{
return "ActualMessage1";
}
#endif
};Such approach may work for some products, but not for others, especially ones that developed by multiple teams. If one team developed a reference implementation of the communication protocol being used and is an "owner" of the code, then it may be difficult and/or impractical for other team to push required changes upstream.
Another approach is to remove hard coded
inheritance relationship between Message interface class and intermediate
MessageBase class. Instead, provide the common interface class as a
template parameter to the latter:
template <typename TIternface, typename TDerived>
class MessageBase : public TIternface
{
protected:
virtual void dispatchImpl(Handler& handler) override {...};
}And the ActualMessage* classes will look like this:
template <typename TIternface>
class ActualMessage1 : public MessageBase<TIternface, ActualMessage1>
{
...
};
template <typename TIternface>
class ActualMessage2 : public MessageBase<TIternface, ActualMessage2>
{
...
};Then, the initial embedded system may use the common protocol code like this:
using EmbReadIterator = ...;
using EmbWriteIterator = ...;
using EmbMessage = Message<EmbReadIterator, EmbWriteIterator>;
using EmbMessage1 = ActualMessage1<EmbMessage>;
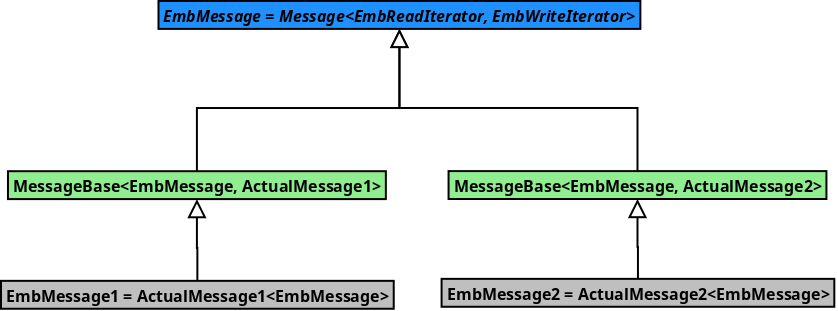
using EmbMessage2 = ActualMessage2<EmbMessage>;The original class hierarchy preserved intact:
And when extended interface and functionality are required, just use extra class inheritances:
// Define extended interface
template <typename TReadIterator, typename TWriteIterator>
class ExtMessage : public Message<TReadIterator, TWriteIterator>
{
public:
const char* name() const
{
return nameImpl();
}
protected:
virtual const char* nameImpl() const = 0;
}
// Define extended messages
<typename TInterface>
class ExtActualMessage1 : public ActualMessage1<TInterface>
{
protected:
virtual const char* nameImpl() const
{
return "ActualMessage1";
}
}The new application that requires extended implementation may still reuse the common protocol code like this:
using NewReadIterator = ...;
using NewWriteIterator = ...;
using NewMessage = ExtMessage<NewReadIterator, NewWriteIterator>;
using NewMessage1 = ExtActualMessage1<NewMessage>;
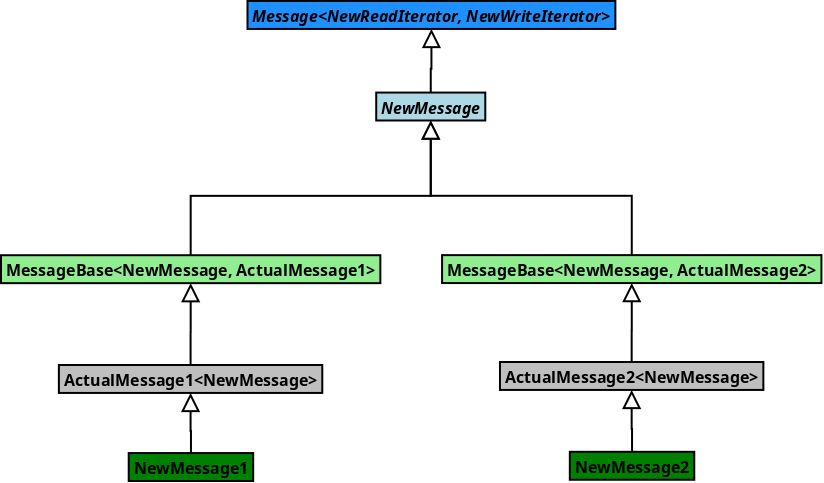
using NewMessage2 = ExtActualMessage2<NewMessage>;As a result, no extra modifications to the original source code of the protocol implementation is required, and every team achieves their own goal. Everyone is happy!!!
The extended class hierarchy becomes:
Fields
Every message in any communication protocol has zero or more internal fields, which get serialised in some predefined order and transferred as message payload over I/O link.
Usually developers implement some
boilerplate code
of explicitly reading and writing all message fields in appropriate functions,
such as readImpl() and writeImpl() described in
Reading and Writing chapter. The primary
disadvantage of this approach is an increased development effort when contents
of some message need to be modified, i.e. some new field is added,
or existing one removed, even when the type of an existing field changes.
Having multiple places in the code, that need to be updated, leads to
an increased chance of forgetting to update one of the places, or introducing
some silly error, which will take time to notice and fix.
This chapter describes how to automate basic operations, such as read and write, i.e. to make it a responsibility of the compiler to generate appropriate code. All the developer needs to do is to define the list of all the field types the message contains, and let the compiler do the job.
Automating Basic Operations
Let’s start with automation of read and write. In most cases the read()
operation of the message has to read all the fields the message
contains, as well as write() operation has to write all the fields of
the message.
In order to make the generation of appropriate read/write code to be a job of the compiler we have to:
-
Provide the same interface for every message field.
-
Introduce a meta-programming friendly structure to hold all the fields, such as
std::tuple. -
Use meta-programming techniques to iterate over every field in the bundle and invoke the required read/write function of every field.
Let’s assume, all the message fields provide the following interface:
class SomeField
{
public:
// Value storage type definition
using ValueType = ...;
// Provide an access to the stored value
ValueType& value();
const ValueType& value() const;
// Read (deserialise) and update internal value
template <typename TIter>
ErrorStatus read(TIter& iter, std::size_t len);
// Write (serialise) internal value
template <typename TIter>
ErrorStatus write(TIter& iter, std::size_t len) const;
// Get the serialisation length
std::size_t length() const;
private:
ValueType m_value;
}The custom message class needs to define its fields bundled in std::tuple
class ActualMessage1 : public Message
{
public:
using Field1 = ...
using Field2 = ...
using Field3 = ...
using AllFields = std::tuple<
Field1,
Field2,
Field3
>;
...
protected:
virtual ErrorStatus readImpl(ReadIterator& iter, std::size_t len) override
{
...// invoke read() member function of every field
}
virtual ErrorStatus writeImpl(WriteIterator& iter, std::size_t len) const override
{
...// invoke write() member function of every field
}
private:
AllFields m_fields;
};What remains is to implement automatic invocation of read() and
write() member function for every field in AllFields tuple.
Let’s take a look at standard algorithm
std::for_each.
Its last parameter is a functor object, which must define appropriate
operator() member function. This function is invoked for every element being
iterated over. What we need is something similar, but
instead of receiving iterators, it must receive a full tuple object, and the
operator() of provided functor must be able to receive any type, i.e. be a template
function.
As the result the signature of such function may look like this:
template <typename TTuple, typename TFunc>
void tupleForEach(TTuple&& tuple, TFunc&& func);where tuple is l- or r-value reference to any std::tuple object, and func is
l- or r-value reference to a functor object that must define the following
public interface:
struct MyFunc
{
template <typename TTupleElem>
void operator()(TTupleElem&& elem) {...}
};Implementation of the`tupleForEach()` function described above can be a nice exercise for practising some meta-programming skills. Appendix A - tupleForEach contains the required code if help is required.
Implementing Read
In order to implement read functionality there is a need to define proper reading functor class, which may receive any field:
class FieldReader
{
public:
FieldReader(ErrorStatus& status, ReadIterator& iter, std::size_t& len)
: m_status(status),
m_iter(iter),
m_len(len)
{
}
template <typename TField>
void operator()(TField& field)
{
if (m_status != ErrorStatus::Success) {
// Error occurred earlier, don't continue with read
return;
}
m_status = field.read(m_iter, m_len);
if (m_status == ErrorStatus::Success) {
m_len -= field.length();
}
}
private:
ErrorStatus& m_status;
ReadIterator& m_iter;
std::size_t& m_len;
}Then the body of readImpl() member function of the actual message class
may look like this:
class ActualMessage1 : public Message
{
public:
using AllFields = std::tuple<...>;
protected:
virtual ErrorStatus readImpl(ReadIterator& iter, std::size_t len) override
{
auto status = ErrorStatus::Success;
tupleForEach(m_fields, FieldReader(status, iter, len));
return status;
}
private:
AllFields m_fields;
};From now on, any modification to the AllFields bundle of fields does NOT require
any additional modifications to the body of readImpl() function. It becomes
a responsibility of the compiler to invoke read() member function of all the
fields.
Implementing Write
Implementation of the write functionality is very similar. Below is the implementation of the writer functor class:
class FieldWriter
{
public:
FieldWriter(ErrorStatus& status, WriterIterator& iter, std::size_t& len)
: m_status(status),
m_iter(iter),
m_len(len)
{
}
template <typename TField>
void operator()(TField& field)
{
if (m_status != ErrorStatus::Success) {
// Error occurred earlier, don't continue with write
return;
}
m_status = field.write(m_iter, m_len);
if (m_status == ErrorStatus::Success) {
m_len -= field.length();
}
}
private:
ErrorStatus& m_status;
WriterIterator& m_iter;
std::size_t& m_len;
}Then the body of writeImpl() member function of the actual message class
may look like this:
class ActualMessage1 : public Message
{
public:
using AllFields = std::tuple<...>;
protected:
virtual ErrorStatus writeImpl(WriterIterator& iter, std::size_t len) const override
{
auto status = ErrorStatus::Success;
tupleForEach(m_fields, FieldWriter(status, iter, len));
return status;
}
private:
AllFields m_fields;
};Just like with reading, any modification to the AllFields bundle of fields does NOT require
any additional modifications to the body of writeImpl() function. It becomes
a responsibility of the compiler to invoke write() member function of all the
fields.
Eliminating Boilerplate Code
It is easy to notice that the body of readImpl() and writeImpl() of every
ActualMessage* class looks the same. What differs is the tuple of fields which
get iterated over.
It is possible to eliminate such duplication of boilerplate code by introducing additional class in the class hierarchy, which receives a bundle of fields as a template parameter and implements the required functions. The same technique was used to eliminate boilerplate code for Dispatching and Handling.
// Common interface class:
class Message {...};
template <typename TFields>
class MessageBase : public Message
{
public:
using Message::ReadIterator;
using Message::WriteIterator;
using AllFields = TFields;
// Access to fields bundle
AllFields& fields() { return m_fields; }
const AllFields& fields() const { return m_fields; }
protected:
virtual ErrorStatus readImpl(ReadIterator& iter, std::size_t len) override
{
auto status = ErrorStatus::Success;
tupleForEach(m_fields, FieldReader(status, iter, len));
return status;
}
virtual ErrorStatus writeImpl(WriterIterator& iter, std::size_t len) const override
{
auto status = ErrorStatus::Success;
tupleForEach(m_fields, FieldWriter(status, iter, len));
return status;
}
private:
class FieldReader { ... /* same code as from earlier example */ };
class FieldWriter { ... /* same code as from earlier example */ };
AllFields m_fields;
}All the ActualMessage* classes need to inherit from MessageBase while
providing their own fields. The right implementation of
readImpl() and writeImpl() is going to be generated by the compiler automatically for
every custom message.
using ActualMessage1Fields = std::tuple<...>;
class ActualMessage1 : public MessageBase<ActualMessage1Fields> {...};
using ActualMessage2Fields = std::tuple<...>;
class ActualMessage2 : public MessageBase<ActualMessage2Fields> {...};
...The class hierarchy looks like this:
Other Basic Operations
In addition to read and write, there are other operations that can be automated. For example, the serialisation length of the full message is a summary of the serialisation lengths of all the fields. If every field can report its serialisation length, then the implementation may look like this:
class Message
{
public:
std::size_t length() const
{
return lengthImpl();
}
protected:
virtual std::size_t lengthImpl() const = 0;
};
template <typename TFields>
class MessageBase : public Message
{
protected:
virtual std::size_t lengthImpl() const override
{
return tupleAccumulate(m_fields, 0U, LengthCalc());
}
private:
struct LengthCalc
{
template <typename TField>
std::size_t operator()(std::size_t size, const TField& field) const
{
return size + field.length();
}
};
AllFields m_fields;
}NOTE, that example above used tupleAccumulate() function, which is
similar to std::accumulate.
The main difference is that binary operation function object, provided to the
function, must be able to receive any type, just like with tupleForEach()
described earlier. The code of tupleAccumulate() function can be found in
Appendix B - tupleAccumulate.
Another example is an automation of validity check. In most cases the message is considered to be valid if all the fields are valid. Let’s assume that every fields can also provide an information about validity of its data:
class SomeField
{
public:
// Get validity information
bool valid() const;
...
}The implementation of message contents validity check may look like this:
class Message
{
public:
bool valid() const
{
return validImpl();
}
protected:
virtual bool validImpl() const = 0;
};
template <typename TFields>
class MessageBase : public Message
{
protected:
virtual bool validImpl() constImpl() const override
{
return tupleAccumulate(m_fields, true, ValidityCalc());
}
private:
struct ValidityCalc
{
template <typename TField>
bool operator()(bool valid, const TField& field) const
{
return valid && field.valid();
}
};
AllFields m_fields;
}Overriding Automated Default Behaviour
It is not uncommon to have some optional fields in the message, the existence
of which depends on some bits in previous fields. In this case the default
read and/or write behaviour generated by the compiler needs to be modified.
Thanks to the inheritance relationship between the classes, nothing prevents us
from overriding the readImpl() and/or writeImpl() function and providing the
right behaviour:
using ActualMessage1Fields = std::tuple<...>;
class ActualMessage1 : public MessageBase<ActualMessage1Fields>
{
protected:
virtual void readImpl(ReadIterator& iter, std::size_t len) override {...}
virtual void writeImpl(WriteIterator& iter, std::size_t len) const override {...}
}The MessageBase<…> class already contains the definition of FieldReader and
FieldWriter helper classes, it can provide helper functions to read/write only
several fields from the whole bundle. These functions can be reused in the
overriding implementations of readImpl() and/or writeImpl():
template <typename TFields>
class MessageBase : public Message
{
...
protected:
template <std::size_t TFromIdx, std::size_t TUntilIdx>
ErrorStatus readFieldsFromUntil(
ReadIterator& iter,
std::size_t& size)
{
auto status = ErrorStatus::Success;
tupleForEachFromUntil<TFromIdx, TUntilIdx>(
m_fields, FieldReader(status, iter, size));
return status;
}
template <std::size_t TFromIdx, std::size_t TUntilIdx>
ErrorStatus writeFieldsFromUntil(
WriteIterator& iter,
std::size_t size) const
{
auto status = ErrorStatus::Success;
tupleForEachFromUntil<TFromIdx, TUntilIdx>(
m_fields, FieldWriter(status, iter, size));
return status;
}
private:
class FieldReader { ... };
class FieldWriter { ... };
AllFields m_fields;
}The provided readFieldsFromUntil() and writeFieldsFromUntil() protected member
functions use tupleForEachFromUntil() function to perform read/write operations
on a group of selected fields. It is similar to tupleForEach() used earlier, but
receives additional template parameters, that specify indices of the fields for
which the provided functor object needs to be invoked. The code of
tupleForEachFromUntil() function can be found in Appendix C - tupleForEachFromUntil.
Working With Fields
In order to automate some basic operations, all the fields had to provide the same basic interface. As the result the actual field values had to be wrapped in a class that defines the required public interface. Such class must also provide means to access/update the wrapped value. For example:
class SomeField
{
public:
// Value storage type definition
using ValueType = ...;
// Provide an access to the stored value
ValueType& value() { return m_value; }
const ValueType& value() const { return m_value; }
...
private:
ValueType m_value;
}Let’s assume the ActualMessage1 defines 3 integer value fields with
serialisation lengths of 1, 2, and 4 bytes respectively.
using ActualMessage1Fields = std::tuple<
IntValueField<std::int8_t>,
IntValueField<std::int16_t>
IntValueField<std::int32_t>
>;
class ActualMessage1 : public MessageBase<ActualMessage1Fields> {...};The Dispatching and Handling chapter described the efficient way to dispatch message object to its handler. The appropriate handling function may access its field’s value using the following code flow:
class Handler
{
public:
void handle(ActualMessage1& msg)
{
// Get access to the field's bundle of type std::tuple
auto& allFields = msg.fields();
// Get access to the field abstractions.
auto& field1 = std::get<0>(allFields);
auto& field2 = std::get<1>(allFields);
auto& field3 = std::get<2>(allFields);
// Get access to the values themselves:
std::int8_t val1 = field1.value();
std::int16_t val2 = field2.value();
std::int32_t val3 = field3.value();
... Do something with retrieved values
}
};When preparing message to send, the similar code sequence may be applied to update the values:
ActualMessage1 msg;
// Get access to the field's bundle of type std::tuple
auto& allFields = msg.fields();
// Get access to the field abstractions.
auto& field1 = std::get<0>(allFields);
auto& field2 = std::get<1>(allFields);
auto& field3 = std::get<2>(allFields);
// Update the values themselves:
field1.value() = ...;
field2.value() = ...;
field3.value() = ...;
// Serialise and send the message:
sendMessage(msg);Common Field Types
The majority of communication protocols use relatively small set of various field types. However, the number of various ways used to serialise these fields, as well as handle them in different parts of the code, may be significantly bigger.
It would be impractical to create a separate class for each and every variant of the same type fields. That’s why there is a need to use template parameters when defining a frequently used field type. The basic example would be implementing numeric integral value fields. Different fields of such type may have different serialisation lengths.
template <typename TValueType>
class IntValueField
{
public:
using ValueType = TValueType;
// Accessed stored value
ValueType& value() { return m_value; }
const ValueType& value() const { return m_value; }
template <typename TIter>
ErrorStatus read(TIter& iter, std::size_t len) {... /* read m_value */ }
template <typename TIter>
ErrorStatus write(TIter& iter, std::size_t len) const {... /* write m_value */ }
private:
ValueType m_value = 0;
};Below is a description of most common fields used by majority of binary communication protocols with the list of possible variations, that can influence how the field is serialised and/or handled.
The Generic Library chapter will concentrate on how to generalise development of any communication protocol by creating a generic library and reusing it in independent implementations of various protocols. It will also explain how to create generic field classes for the types listed below.
Numeric Integral Values
Used to operate with simple numeric integer values.
-
May have different serialisation length: 1, 2, 3, 4, 5, … bytes. Having basic types of
std::uint8_t,std::uint16_t,std::uint32_t, … may be not enough. Some extra work may be required to support lengths, such as 3, 5, 6, 7 bytes. -
May be signed and unsigned. Some protocols require different serialisation rules for signed values, such as adding some predefined offset prior to serialisation to make sure that the value being serialised is non-negative. When value deserialised, the same offset must be subtracted to get the actual value.
-
May have variable serialisation length, based on the value being serialised, such as having Base-128 encoding.
Enumeration Values
Similar to Numeric Integral Values, but storing the value as enumeration type for easier access.
Bitmask Values
Similar to Numeric Integral Values, but with unsigned internal storage type and with each bit having separate meaning. The class definition should support having different serialisation lengths as well as provide a convenient interface to inquire about and update various bits' values.
Strings
Some protocols serialise strings by prefixing the string itself with its size,
others have '\0' suffix to mark the end of the string.
Some strings may be allocated a fixed size and require
'\0' padding if its actual length is shorter.
Consider how the internal string value is stored. Usually std::string is used.
However, what about the bare-metal embedded systems, that disallow usage of
dynamic memory allocation and/or exceptions? There needs to be a way to substitute
underlying std::string with a custom implementation of some StaticString
that exposes similar interface, but receives a maximum storage size as a template
parameter.
Lists
There may be lists of raw bytes, list of other fields, or even a group of fields. Similar to Strings, the serialisation of lists may differ. Lists of variable size may require a prefix with their size information. Other lists may have fixed (predefined) size and will not require any additional size information.
The internal storage consideration is applicable here as well. For most systems
std::vector will do the job, but for bare-metal ones something else may be
required. For example some custom implementation of StaticVector that exposes
the same public interface, but receives a maximum storage size as a template parameter.
There must be an easy way to substitute one with another.
Bundles
The group of fields sometimes needs to be bundled into a single entity and be treated as a single field. The good example would be having a list of complex structures (bundles).
Bitfields
Similar to Bundles, where every field member takes only limited number of bits instead of bytes. Usually the members of the bitfields are Numeric Integral Values, Enumeration Values, and Bitmask Values.
Common Variations
All the fields stated above may require an ability to:
-
set custom default value when the field object is created.
-
have custom value validation logic.
-
fail the read operation on invalid value.
-
ignore the incoming invalid value, i.e. not to fail the read operation, but preserve the existing value if the value being read is invalid.
Generic Library
All the generalisation techniques, described so far, are applicable to most binary communication protocols. It is time to think about something generic - a library that can be reused between independent projects and facilitate a development of any binary communication protocol.
From now on, every generic, protocol independent class and/or function
is going to reside in comms namespace in order to differentiate it from a
protocol specific code.
Generalising Message Interface
The basic generic message interface may include the following operations:
-
Retrieve the message ID.
-
Read (deserialise) the message contents from raw data in a buffer.
-
Write (serialise) the message contents into a buffer.
-
Calculate the serialisation length of the message.
-
Dispatch the message to an appropriate handling function.
-
Check the validity of the message contents.
There may be multiple cases when not all of the operations stated above are
needed for some specific case. For example, some sensor only reports its
internal data to the outside world over some I/O link, and doesn’t listen to
the incoming messages. In this case the read() operation is redundant and
its implementation should not take space in the produced binary code.
However, the component that resides on the other end of the I/O link requires
the opposite functionality, it only consumes data, without producing anything,
i.e. write() operation becomes unnecessary.
There must be a way to limit the basic interface to a particular set of functions, when needed.
Also there must be a way to specify:
-
type used to store and report the message ID.
-
type of the read/write iterators
-
endian used in data serialisation.
-
type of the message handling class, which is used in
dispatch()functionality.
The best way to support such variety of requirements is to use the variadic templates feature of C++11, which allows having non-fixed number of template parameters.
These parameters have to be parsed and used to define all the required internal functions and types. The common message interface class is expected to be defined like this:
namespace comms
{
template <typename... TOptions>
class Message
{
...
};
} // namespace commswhere TOptions is a set of classes/structs, which can be used to define all the
required types and functionalities.
Below is an example of such possible option classes:
namespace comms
{
namespace option
{
// Define type used to store message ID
template <typename T>
struct MsgIdType{};
// Specify type of iterator used for reading
template <typename T>
struct ReadIterator {};
// Specify type of iterator used for writing
template <typename T>
struct WriteIterator {};
// Use little endian for serialisation (instead of default big)
struct LittleEndian {};
// Include serialisation length retrieval in public interface
struct LengthInfoInterface {};
// Include validity check in public interface
struct ValidCheckInterface {};
// Define handler class
template <typename T>
struct Handler{};
} // namespace option
} // namespace commsOur PRIMARY OBJECTIVE for this chapter is to provide an ability to create a common message interface class with only requested functionality.
For example, the definition of MyMessage interface class below
class MyHandler;
using MyMessage = comms::Message<
comms::option::MsgIdType<std::uint16_t>, // use std::uint16_t as message ID type
comms::option::ReadIterator<const std::uint8_t*>, // use const std::uint8_t* as iterator for reading
comms::option::WriteIterator<std::uint8_t*>, // use std::uint8_t* as iterator for writing
comms::option::LengthInfoInterface, // add length() member function to interface
comms::option::Handler<MyHandler> // add dispatch() member function with MyHandler as the handler class
>;should be equivalent to defining:
class MyMessage
{
public:
using MsgIdType = std::uint16_t;
using ReadIterator = const std::uint8_t*;
using WriteIterator = std::uint8_t*;
using Handler = MyHandler;
MsgIdType id() {...}
ErrorStatus read(ReadIterator& iter, std::size_t len) {...}
ErrorStatus write(WriteIterator& iter, std::size_t len) const {...}
std::size_t length() const {...}
void dispatch(Handler& handler) {...}
protected:
template <typename T>
static T readData(ReadIterator& iter) {...} // use big endian by default
template <typename T>
static void writeData(T value, WriteIterator& iter) {...} // use big endian by default
...
};And the following definition of MyMessage interface class
using MyMessage = comms::Message<
comms::option::MsgIdType<std::uint8_t>, // use std::uint8_t as message ID type
comms::option::LittleEndian, // use little endian in serialisation
comms::option::ReadIterator<const std::uint8_t*> // use const std::uint8_t* as iterator for reading
>;will be equivalent to:
class MyMessage
{
public:
using MsgIdType = std::uint8_t;
using ReadIterator = const std::uint8_t*;
MsgIdType id() {...}
ErrorStatus read(ReadIterator& iter, std::size_t len) {...}
protected:
template <typename T>
static T readData(ReadIterator& iter) {...} // use little endian
template <typename T>
static void writeData(T value, WriteIterator& iter) {...} // use little endian
...
};Looks nice, isn’t it? So, how are we going to achieve this? Any ideas?
That’s right! We use MAGIC!
Sorry, I mean template meta-programming. Let’s get started!
Parsing the Options
First thing, that needs to be done, is to parse the provided options and record
them in some kind of a summary structure, with predefined list of
static const bool variables, which indicate what options have been used,
such as one below:
struct MessageInterfaceParsedOptions
{
static const bool HasMsgIdType = false;
static const bool HasLittleEndian = false;
static const bool HasReadIterator = false;
static const bool HasWriteIterator = false;
static const bool HasHandler = false;
static const bool HasValid = false;
static const bool HasLength = false;
}If some variable is set to true, the summary structure may also contain
some additional relevant types and/or more variables.
For example the definition of
class MyHandler;
using MyMessage = comms::Message<
comms::option::MsgIdType<std::uint16_t>, // use std::uint16_t
comms::option::ReadIterator<const std::uint8_t*>, // use const std::uint8_t* as iterator for reading
comms::option::WriteIterator<std::uint8_t*>, // use std::uint8_t* as iterator for writing
comms::option::LengthInfoInterface, // add length() member function to interface
comms::option::Handler<MyHandler> // add dispatch() member function with MyHandler as the handler class
>;should result in
struct MessageInterfaceParsedOptions
{
static const bool HasMsgIdType = true;
static const bool HasLittleEndian = false;
static const bool HasReadIterator = true;
static const bool HasWriteIterator = true;
static const bool HasHandler = true;
static const bool HasValid = false;
static const bool HasLength = true;
using MsgIdType = std::uint16_t;
using ReadIterator = const std::uint8_t*;
using WriteIterator = std::uint8_t*;
using Handler = MyHandler;
}Here goes the actual code.
First, there is a need to define an initial version of such summary structure:
namespace comms
{
template <typename... TOptions>
class MessageInterfaceParsedOptions;
template <>
struct MessageInterfaceParsedOptions<>
{
static const bool HasMsgIdType = false;
static const bool HasLittleEndian = false;
static const bool HasReadIterator = false;
static const bool HasWriteIterator = false;
static const bool HasHandler = false;
static const bool HasValid = false;
static const bool HasLength = false;
}
} // namespace commsThen, handle the provided options one by one, while replacing the initial values and defining additional types when needed.
namespace comms
{
template <typename T, typename... TOptions>
struct MessageInterfaceParsedOptions<comms::option::MsgIdType<T>, TOptions...> :
public MessageInterfaceParsedOptions<TOptions...>
{
static const bool HasMsgIdType = true;
using MsgIdType = T;
};
template <typename... TOptions>
struct MessageInterfaceParsedOptions<comms::option::LittleEndian, TOptions...> :
public MessageInterfaceParsedOptions<TOptions...>
{
static const bool HasLittleEndian = true;
};
template <typename T, typename... TOptions>
struct MessageInterfaceParsedOptions<comms::option::ReadIterator<T>, TOptions...> :
public MessageInterfaceParsedOptions<TOptions...>
{
static const bool HasReadIterator = true;
using ReadIterator = T;
};
... // and so on
} // namespace commsNote, that inheritance relationship is used, and according to the C++ language specification the new variables with the same name hide (or replace) the variables defined in the base class.
Also note, that the order of the options being used to define the interface
class does NOT really matter. However, it is recommended, to add some
static_assert() statements in, to make sure the same options are not used twice,
or no contradictory ones are used together (if such exist).
Assemble the Required Interface
The next stage in the defining message interface process is to define various chunks of interface functionality and connect them via inheritance.
namespace comms
{
// ID retrieval chunk
template <typename TBase, typename TId>
class MessageInterfaceIdTypeBase : public TBase
{
public:
using MsgIdType = TId;
MsgIdType getId() const
{
return getIdImpl();
}
protected:
virtual MsgIdType getIdImpl() const = 0;
};
// Big endian serialisation chunk
template <typename TBase>
class MessageInterfaceBigEndian : public TBase
{
protected:
template <typename T>
static T readData(ReadIterator& iter) {...} // use big endian
template <typename T>
static void writeData(T value, WriteIterator& iter) {...} // use big endian
};
// Little endian serialisation chunk
template <typename TBase>
class MessageInterfaceLittleEndian : public TBase
{
protected:
template <typename T>
static T readData(ReadIterator& iter) {...} // use little endian
template <typename T>
static void writeData(T value, WriteIterator& iter) {...} // use little endian
};
// Read functionality chunk
template <typename TBase, typename TReadIter>
class MessageInterfaceReadBase : public TBase
{
public:
using ReadIterator = TReadIter;
ErrorStatus read(ReadIterator& iter, std::size_t size)
{
return readImpl(iter, size);
}
protected:
virtual ErrorStatus readImpl(ReadIterator& iter, std::size_t size) = 0;
};
... // and so on
} // namespace commsNote, that the interface chunks receive their base class through template parameters. It will allow us to connect them together using inheritance. Together they can create the required custom interface.
There is a need for some extra helper classes to implement such connection logic which chooses only requested chunks and skips the others.
The code below chooses whether to add MessageInterfaceIdTypeBase into
the inheritance chain of interface chunks.
namespace comms
{
template <typename TBase, typename TParsedOptions, bool THasMsgIdType>
struct MessageInterfaceProcessMsgId;
template <typename TBase, typename TParsedOptions>
struct MessageInterfaceProcessMsgId<TBase, TParsedOptions, true>
{
using Type = MessageInterfaceIdTypeBase<TBase, typename TParsedOptions::MsgIdType>;
};
template <typename TBase, typename TParsedOptions>
struct MessageInterfaceProcessMsgId<TBase, TParsedOptions, false>
{
using Type = TBase;
};
} // namespace commsLet’s assume that the interface options were parsed and typedef-ed into some
ParsedOptions type:
using ParsedOptions = comms::MessageInterfaceParsedOptions<TOptions...>;Then after the following definition statement
using NewBaseClass =
comms::MessageInterfaceProcessMsgId<
OldBaseClass,
ParsedOptions,
ParsedOptions::HasMsgIdType
>::Type;the NewBaseClass is the same as OldBaseClass, if the value of
ParsedOptions::HasMsgIdType is false (type of message ID wasn’t provided
via options), otherwise NewBaseClass becomes
comms::MessageInterfaceIdTypeBase, which inherits from OldBaseClass.
Using the same pattern the other helper wrapping classes must be implemented also.
Choose right chunk for endian:
namespace comms
{
template <typename TBase, bool THasLittleEndian>
struct MessageInterfaceProcessEndian;
template <typename TBase>
struct MessageInterfaceProcessEndian<TBase, true>
{
using Type = MessageInterfaceLittleEndian<TBase>;
};
template <typename TBase>
struct MessageInterfaceProcessEndian<TBase, false>
{
using Type = MessageInterfaceBigEndian<TBase>;
};
} // namespace commsAdd read functionality if required:
namespace comms
{
template <typename TBase, typename TParsedOptions, bool THasReadIterator>
struct MessageInterfaceProcessReadIterator;
template <typename TBase, typename TParsedOptions>
struct MessageInterfaceProcessReadIterator<TBase, TParsedOptions, true>
{
using Type = MessageInterfaceReadBase<TBase, typename TParsedOptions::ReadIterator>;
};
template <typename TBase, typename TParsedOptions>
struct MessageInterfaceProcessReadIterator<TBase, TParsedOptions, false>
{
using Type = TBase;
};
} // namespace commsAnd so on…
The interface building code just uses the helper classes in a sequence of type definitions:
namespace comms
{
class EmptyBase {};
template <typename... TOptions>
struct MessageInterfaceBuilder
{
// Parse the options
using ParsedOptions = MessageInterfaceParsedOptions<TOptions...>;
// Add ID retrieval functionality if ID type was provided
using Base1 = typename MessageInterfaceProcessMsgId<
EmptyBase, ParsedOptions, ParsedOptions::HasMsgIdType>::Type;
// Add readData() and writeData(), that use the right endian
using Base2 = typename MessageInterfaceProcessEndian<
Base1, ParsedOptions::HasLittleEndian>::Type;
// Add read functionality if ReadIterator type was provided
using Base3 = typename MessageInterfaceProcessReadIterator<
Base2, ParsedOptions, ParsedOptions::HasReadIterator>::Type;
// Add write functionality if WriteIterator type was provided
using Base4 = typename MessageInterfaceProcessWriteIterator<
Base3, ParsedOptions, ParsedOptions::HasWriteIterator>::Type;
// And so on...
...
using BaseN = ...;
// The last BaseN must be taken as final type.
using Type = BaseN;
};
} // namespace commsOnce all the required definitions are in place, the common dynamic message
interface class comms::Message may be defined as:
namespace comms
{
template <typename... TOptions>
class Message : public typename MessageInterfaceBuilder<TOptions...>::Type
{
};
} // namespace commsAs the result, any distinct set of options provided as the template parameters
to comms::Message class will cause it to have the required types and
member functions.
Now, when the interface is in place, it is time to think about providing
common comms::MessageBase class which is responsible to provide
default implementation for functions, such as readImpl(), writeImpl(),
dispatchImpl(), etc…
Generalising Message Implementation
Previous chapters described MessageBase class, which provided implementation for
some portions of polymorphic behaviour defined in the interface class Message.
Such implementation eliminated common boilerplate code used in every ActualMessage*
class.
This chapter is going to generalise the implementation of MessageBase into
the generic comms::MessageBase class, which is communication protocol independent
and can be re-used in any other development.
The generic comms::MessageBase class must be able to:
-
provide the ID of the message, i.e. implement the
idImpl()virtual member function, when such ID is known at compile time. -
provide common dispatch functionality, i.e. implement
dispatchImpl()virtual member function, described in Dispatching and Handling chapter. -
support extension of the default message interface, described in Extending Interface chapter.
-
automate common operations on fields, i.e. implement
readImpl(),writeImpl(),lengthImpl(), etc…, described in Automating Basic Operations chapter.
Just like common comms::Message interface class, the comms::MessageBase
will also receive options to define its behaviour.
namespace comms
{
template <typename TBase, typename... TOptions>
class MessageBase : public TBase
{
...
};
} // namespace commsNote, that the comms::MessageBase class receives its base class as a
template parameter. It is expected to be any variant of comms::Message or
any extended interface class, which inherits from comms::Message.
The supported options may include:
namespace comms
{
namespace option
{
// Provide static numeric ID, to facilitate implementation of idImpl()
template <std::intmax_t TId>
struct StaticNumIdImpl {};
// Facilitate implementation of dispatchImpl()
template <typename TActual>
struct DispatchImpl {};
// Provide fields of the message, facilitate implementation of
// readImpl(), writeImpl(), lengthImpl(), validImpl(), etc...
template <typename TFields>
struct FieldsImpl {};
} // namespace option
} // namespace commsParsing the Options
The options provided to the comm::MessageBase class need to be parsed in a
very similar way as it was with comms::Message in the previous chapter.
Starting with initial version of the options struct:
namespace comms
{
template <typename... TOptions>
class MessageImplParsedOptions;
template <>
struct MessageImplParsedOptions<>
{
static const bool HasStaticNumIdImpl = false;
static const bool HasDispatchImpl = false;
static const bool HasFieldsImpl = false;
}
} // namespace commsand replacing the initial value of the appropriate variable with new ones, when appropriate option is discovered:
namespace comms
{
template <std::intmax_t TId, typename... TOptions>
struct MessageImplParsedOptions<option::StaticNumIdImpl<TId>, TOptions...> :
public MessageImplParsedOptions<TOptions...>
{
static const bool HasStaticNumIdImpl = true;
static const std::intmax_t MsgId = TID;
};
template <typename TActual, typename... TOptions>
struct MessageImplParsedOptions<option::DispatchImpl<TActual>, TOptions...> :
public MessageImplParsedOptions<TOptions...>
{
static const bool HasDispatchImpl = true;
using ActualMessage = TActual;
};
template <typename TFields, typename... TOptions>
struct MessageImplParsedOptions<option::FieldsImpl<TFields>, TOptions...> :
public MessageImplParsedOptions<TOptions...>
{
static const bool HasFieldsImpl = true;
using Fields = TFields;
};
} // namespace commsAssemble the Required Implementation
Just like with building custom message interface, there is a need to create chunks of implementation parts and connect them using inheritance based on used options.
namespace comms
{
// ID information chunk
template <typename TBase, std::intmax_t TId>
class MessageImplStaticNumIdBase : public TBase
{
public:
// Reuse the message ID type defined in the interface
using MsgIdType = typename Base::MsgIdType;
protected:
virtual MsgIdType getIdImpl() const override
{
return static_cast<MsgIdType>(TId);
}
};
// Dispatch implementation chunk
template <typename TBase, typename TActual>
class MessageImplDispatchBase : public TBase
{
public:
// Reuse the Handler type defined in the interface class
using Handler = typename Base::Handler;
protected:
virtual void dispatchImpl(Handler& handler) const override
{
handler.handle(static_cast<TActual&>(*this));
}
};
} // namespace commsNOTE, that single option comms::option::FieldsImpl<> may facilitate
implementation of multiple functions: readImpl(), writeImpl(), lengthImpl(),
etc… Every such function was declared due to using a separate option when
defining the interface. We’ll have to cherry-pick appropriate implementation
parts, based on the interface options. As the result, these implementation
chunks must be split into separate classes.
namespace comms
{
template <typename TBase, typename TFields>
class MessageImplFieldsBase : public TBase
{
public:
using AllFields = TFields;
AllFields& fields() { return m_fields; }
const AllFields& fields() const { return m_fields; }
private:
TFields m_fields;
};
template <typename TBase>
class NessageImplFieldsReadBase : public TBase
{
public:
// Reuse ReadIterator definition from interface class
using ReadIterator = typename TBase::ReadIterator;
protected:
virtual ErrorStatus readImpl(ReadIterator& iter, std::size_t len) override
{
// Access fields via interface provided in previous chunk
auto& allFields = TBase::fields();
... // read all the fields
}
};
... // and so on
} // namespace commsAll these implementation chunks are connected together using extra helper classes in a very similar way to how the interface chunks where connected:
Add idImpl() if needed
namespace comms
{
template <typename TBase, typename ParsedImplOptions, bool TImplement>
struct MessageImplProcessStaticNumId;
template <typename TBase, typename ParsedImplOptions>
struct MessageImplProcessStaticNumId<TBase, ParsedImplOptions, true>
{
using Type = MessageImplStaticNumIdBase<TBase, ParsedImplOptions::MsgId>;
};
template <typename TBase, typename ParsedImplOptions>
struct MessageInterfaceProcessEndian<TBase, false>
{
using Type = TBase;
};
} // namespace commsAdd dispatchImpl() if needed
namespace comms
{
template <typename TBase, typename ParsedImplOptions, bool TImplement>
struct MessageImplProcessDispatch;
template <typename TBase, typename ParsedImplOptions>
struct MessageImplProcessDispatch<TBase, ParsedImplOptions, true>
{
using Type = MessageImplDispatchBase<TBase, typename ParsedImplOptions::ActualMessage>;
};
template <typename TBase, typename ParsedImplOptions>
struct MessageImplProcessDispatch<TBase, false>
{
using Type = TBase;
};
} // namespace commsAdd fields() access if needed
namespace comms
{
template <typename TBase, typename ParsedImplOptions, bool TImplement>
struct MessageImplProcessFields;
template <typename TBase, typename ParsedImplOptions>
struct MessageImplProcessFields<TBase, ParsedImplOptions, true>
{
using Type = MessageImplFieldsBase<TBase, typename ParsedImplOptions::Fields>;
};
template <typename TBase, typename ParsedImplOptions>
struct MessageImplProcessFields<TBase, false>
{
using Type = TBase;
};
} // namespace commsAdd readImpl() if needed
namespace comms
{
template <typename TBase, bool TImplement>
struct MessageImplProcessReadFields;
template <typename TBase>
struct MessageImplProcessReadFields<TBase, true>
{
using Type = NessageImplFieldsReadBase<TBase>;
};
template <typename TBase>
struct MessageImplProcessReadFields<TBase, false>
{
using Type = TBase;
};
} // namespace commsAnd so on for all the required implementation chunks: writeImpl(), lengthImpl(),
validImpl(), etc…
The final stage is to connect all the implementation chunks together
via inheritance and derive comms::MessageBase class from the result.
NOTE, that existence of the implementation chunk depends not only on the
implementation options provided to comms::MessageBase, but also on the
interface options provided to comms::Message. For example, writeImpl() must
be added only if comms::Message interface includes write() member function
(comms::option::WriteIterator<> option was used) and implementation option
which adds support for fields (comms::option::FieldsImpl<>) was passed to
comms::MessageBase.
The implementation builder helper class looks as following:
namespace comms
{
// TBase is interface class
// TOptions... are the implementation options
template <typename TBase, typename... TOptions>
struct MessageImplBuilder
{
// ParsedOptions class is supposed to be defined in comms::Message class
using InterfaceOptions = typename TBase::ParsedOptions;
// Parse implementation options
using ImplOptions = MessageImplParsedOptions<TOptions...>;
// Provide idImpl() if possible
static const bool HasStaticNumIdImpl =
InterfaceOptions::HasMsgIdType && ImplOptions::HasStaticNumIdImpl;
using Base1 = typename MessageImplProcessStaticNumId<
TBase, ImplOptions, HasStaticNumIdImpl>::Type;
// Provide dispatchImpl() if possible
static const bool HasDispatchImpl =
InterfaceOptions::HasHandler && ImplOptions::HasDispatchImpl;
using Base2 = typename MessageImplProcessDispatch<
Base1, ImplOptions, HasDispatchImpl>::Type;
// Provide access to fields if possible
using Base3 = typename MessageImplProcessFields<
Base2, ImplOptions, ImplOptions::HasFieldsImpl>::Type;
// Provide readImpl() if possible
static const bool HasReadImpl =
InterfaceOptions::HasReadIterator && ImplOptions::HasFieldsImpl;
using Base4 = typename MessageImplProcessReadFields<
Base3, HasReadImpl>::Type;
// And so on...
...
using BaseN = ...;
// The last BaseN must be taken as final type.
using Type = BaseN;
};
} // namespace commsDefining the generic comms::MessageBase:
namespace comms
{
template <typename TBase, typename... TOptions>
class MessageBase : public typename MessageImplBuilder<TBase, TOptions>::Type
{
...
};
} // namespace commsPlease note, that TBase template parameter is passed to MessageImplBuilder<>,
which in turn passes it up the chain of possible implementation chunks, and
at the end it turns up to be the base class of the whole hierarchy.
The full hierarchy of classes presented at the image below.
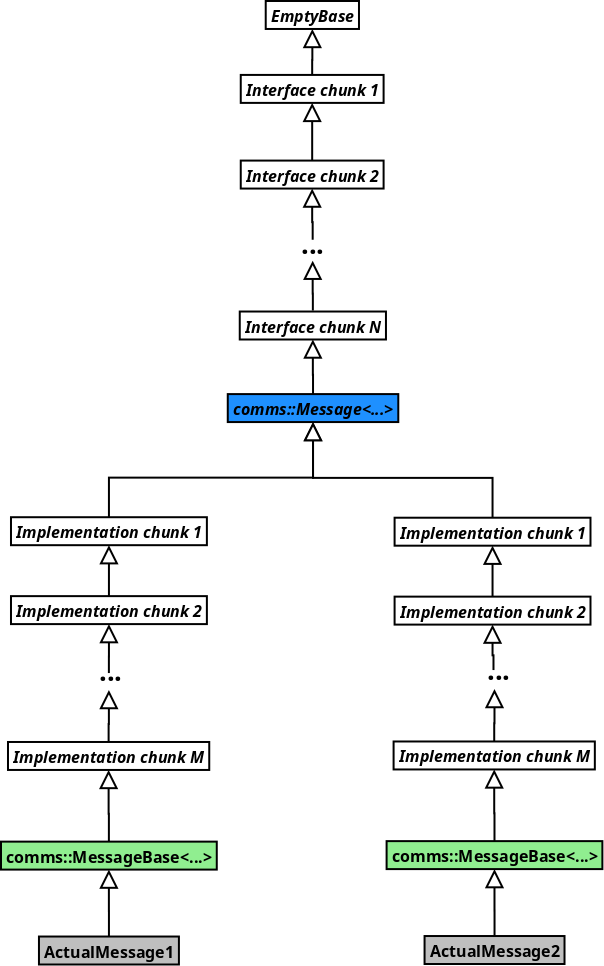
The total number of used classes may seem scary, but there are only two, which
are of any particular interest to us when implementing communication protocol.
It’s comms::Message to specify the interface and comms::MessageBase to
provide default implementation of particular functions. All the rest are just
implementation details.
Summary
After all this work our library contains generic comms::Message class, that
defines the interface, as well as generic comms::MessageBase class, that provides
default implementation for required polymorphic functionality.
Let’s define a custom communication protocol which uses little endian for data serialisation and has numeric message ID type defined with the enumeration below:
enum MyMsgId
{
MyMsgId_Msg1,
MyMsgId_Msg2,
...
};Assuming we have relevant field classes in place (see Fields
chapter), let’s define custom ActualMessage1 that contains two integer
value fields: 2 bytes unsigned value and 1 byte signed value.
using ActualMessage1Fields = std::tuple<
IntValueField<std::uint16_t>,
IntValueField<std::int8_t>
>;
template <typename TMessageInterface>
class ActualMessage1 : public
comms::MessageBase<
comms::option::StaticNumIdImpl<MyMsgId_Msg1>, // provide idImpl() if needed
comms::option::DispatchImpl<ActualMessage1>, // provide dispatchImpl() if needed
comms::option::FieldsImpl<ActualMessage1Fields> // provide access to fields and
// readImpl(), writeImpl(),
// lengthImpl(), validImpl()
// functions if needed
>
{
};That’s it, no extra member functions are needed to be implemented, unless the
message interface class is Extending Interface.
Note, that the implementation of the ActualMessage1 is completely generic
and doesn’t depend on the actual message interface. It can be reused in any
application with any runtime environment that uses our custom protocol.
The interface class is defined according to the requirements of the application, that uses the implementation of the defined protocol.
class MyHandler; // forward declaration of the handler class.
using MyMessage = comms::Message<
comms::option::MsgIdType<MyMsgId>, // add id() operation
comms::option::ReadIterator<const std::uint8_t*>, // add read() operation
comms::option::WriteIterator<std::uint8_t*> // add write() operation
comms::option::Handler<MyHandler>, // add dispatch() operation
comms::option::LengthInfoInterface, // add length() operation
comms::option::ValidCheckInterface, // add valid() operation
comms::option::LittleEndian // use little endian for serialisation
>;For convenience the protocol messages should be redefined with appropriate interface:
using MyActualMessage1 = ActualMessage1<MyMessage>;
using MyActualMessage2 = ActualMessage2<MyMessage>;
...Generalising Fields Implementation
The automation of read/write operations of the message required fields to expose predefined minimal interface:
class SomeField
{
public:
// Value storage type definition
using ValueType = ...;
// Provide an access to the stored value
ValueType& value();
const ValueType& value() const;
// Read (deserialise) and update internal value
template <typename TIter>
ErrorStatus read(TIter& iter, std::size_t len);
// Write (serialise) internal value
template <typename TIter>
ErrorStatus write(TIter& iter, std::size_t len) const;
// Get the serialisation length
std::size_t length() const;
private:
ValueType m_value;
}The read/write operations will probably require knowledge about the serialisation endian used for the protocol. We need to come up with the way to convey the endian information to the field classes. I would recommend doing it by having common base class for all the fields:
namespace comms
{
template <bool THasLittleEndian>
class Field
{
protected:
// Read value using appropriate endian
template <typename T, typename TIter>
static T readData(TIter& iter) {...}
// Read partial value using appropriate endian
template <typename T, std::size_t TSize, typename TIter>
static T readData(TIter& iter) {...}
// Write value using appropriate endian
template <typename T, typename TIter>
static void writeData(T value, TIter& iter) {...}
// Write partial value using appropriate endian
template <std::size_t TSize, typename T, typename TIter>
static void writeData(T value, TIter& iter)
}
} // namespace commsThe choice of the right endian may be implemented using Tag Dispatch Idiom.
namespace comms
{
template <bool THasLittleEndian>
class Field
{
protected:
// Read value using appropriate endian
template <typename T, typename TIter>
static T readData(TIter& iter)
{
// Dispatch to appropriate read function
return readDataInternal<T>(iter, Tag());
}
...
private:
BigEndianTag {};
LittleEndianTag {};
using Tag = typename std::conditional<
THasLittleEndian,
LittleEndianTag,
BigEndianTag
>::type;
// Read value using big endian
template <typename T, typename TIter>
static T readBig(TIter& iter) {...}
// Read value using little endian
template <typename T, typename TIter>
static T readLittle(TIter& iter) {...}
// Dispatch to readBig()
template <typename T, typename TIter>
static T readDataInternal(TIter& iter, BigEndianTag)
{
return readBig<T>(iter);
}
// Dispatch to readLittle()
template <typename T, typename TIter>
static T readDataInternal(TIter& iter, LittleEndianTag)
{
return readLittle<T>(iter);
}
};
} // namespace commsEvery field class should receive its base class as a template parameter and
may use available readData() and writeData() static member functions
when serialising/deserialising internal value in read() and write()
member functions.
For example:
namespace comms
{
template <typename TBase, typename TValueType>
class IntValueField : public TBase
{
using Base = TBase;
public:
using ValueType = TValueType;
...
template <typename TIter>
ErrorStatus read(TIter& iter, std::size_t len)
{
if (len < length()) {
return ErrorStatus::NotEnoughData;
}
m_value = Base::template read<ValueType>(iter);
return ErrorStatus::Success;
}
template <typename TIter>
ErrorStatus write(TIter& iter, std::size_t len) const
{
if (len < length()) {
return ErrorStatus::BufferOverflow;
}
Base::write(m_value, iter);
return ErrorStatus::Success
}
static constexpr std::size_t length()
{
return sizeof(ValueType);
}
private:
ValueType m_value
};
} // namespace commsWhen the endian is known and fixed (for example when implementing third party protocol according to provided specifications), and there is little chance it’s ever going to change, the base class for all the fields may be explicitly defined:
using MyProjField = comms::Field<false>; // Use big endian for fields serialisation
using MyIntField = comms::IntValueField<MyProjField>;However, there may be the case when the endian information is not known up
front, and the one provided to the message interface definition (comms::Message)
must be used. In this case, the message interface class may define common
base class for all the fields:
namespace comms
{
template <typename... TOptions>
class Message : public typename MessageInterfaceBuilder<TOptions...>::Type
{
using Base = typename MessageInterfaceBuilder<TOptions...>::Type;
pablic:
using ParsedOptions = typename Base::ParsedOptions ;
using Field = comms::Field<ParsedOptions::HasLittleEndian>;
...
};
} // namespace commsAs the result the definition of the message’s fields must receive a template parameter of the base class for all the fields:
template <typename TFieldBase>
using ActualMessage1Fields = std::tuple<
comms::IntValueField<TFieldBase>,
comms::IntValueField<TFieldBase>,
...
>:
template <typename TMsgInterface>
class ActualMessage1 : public
comms::MessageBase<
comms::option::FieldsImpl<ActualMessage1Fields<typename TMsgInterface::Field> >,
...
>
{
};Multiple Ways to Serialise Fields
The Common Field Types chapter described most common types of fields with various serialisation and handling nuances, which can be used to implement a custom communication protocol.
Let’s take the basic integer value field as an example. The most common way
to serialise it is just read/write its internally stored value as is. However,
there may be cases when serialisation takes limited number of bytes. Let’s say,
the protocol specification states that some integer value consumes only 3 bytes
in the serialised bytes sequence. In this case the value will probably be be
stored using std::int32_t or std::uint32_t type. The field class will also
require different implementation of read/write/length functionality.
Another possible case is a necessity to add/subtract some predefined offset to/from the value
being serialised and subtracting/adding the same offset when the value is deserialised.
Good example of such case would be the serialisation of a year information,
which is serialised as an offset from year 2000 and consumes only 1 byte.
It is possible to store the value as a single byte
(comms::IntValueField<…, std::uint8_t>), but it would be very inconvenient.
It is much better if we could store a normal year value (2015, 2016, etc …)
using std::uint16_t type, but when serialising, the values that get written
are 15, 16, etc… NOTE, that such field requires two steps in its
serialisation logic:
-
add required offset (
-2000in the example above) -
limit the number of bytes when serialising the result
Another popular way to serialise integer value is to use Base-128 encoding. In this case the number of bytes in the serialisation sequence is not fixed.
What if some protocol decides to serialise the same offset from year 2000, but using the Base-128 encoding? It becomes obvious that having a separate field class for every possible variant is impractical at least. There must be a way to split the serialisation logic into small chunks, which can be applied one on top of another.
Using the same idea of the options and adapting the behaviour of the field class accordingly, we can generalise all the fields into a small subset of classes and make them also part of our generic library.
The options described earlier may be defined using following option classes:
namespace comms
{
namespace option
{
// Provide fixed serialisation length
template<std::size_t TLen>
struct FixedLength {};
// Provide numeric offset to be added to the value before serialisation
template<std::intmax_t TOffset>
struct NumValueSerOffset {};
// Force using variable length (base-128 encoding) while providing
// minimal and maximal allowed serialisation lengths.
template<std::size_t TMin, std::size_t TMax>
struct VarLength {};
} // namespace option
} // namespace commsParsing the Options
In a very similar way to parsing options of the message interface (comms::Message)
and message implementation (comms::MessageBase) described in earlier chapters,
we will create a struct, that will contain all the provided information to be
used later.
namespace comms
{
template <typename... TOptions>
struct FieldParsedOptions;
template <>
struct FieldParsedOptions<>
{
static const bool HasSerOffset = false;
static const bool HasFixedLengthLimit = false;
static const bool HasVarLengthLimits = false;
}
template <std::size_t TLen, typename... TOptions>
struct FieldParsedOptions<option::FixedLength<TLen>, TOptions...> :
public FieldParsedOptions<TOptions...>
{
static const bool HasFixedLengthLimit = true;
static const std::size_t FixedLengthLimit = TLen;
};
template <std::intmax_t TOffset, typename... TOptions>
struct FieldParsedOptions<option::NumValueSerOffset<TOffset>, TOptions...> :
public FieldParsedOptions<TOptions...>
{
static const bool HasSerOffset = true;
static const auto SerOffset = TOffset;
};
template <std::size_t TMinLen, std::size_t TMaxLen, typename... TOptions>
struct FieldParsedOptions<VarLength<TMinLen, TMaxLen>, TOptions...> :
public FieldParsedOptions<TOptions...>
{
static const bool HasVarLengthLimits = true;
static const std::size_t MinVarLength = TMinLen;
static const std::size_t MaxVarLength = TMaxLen;
};
} // namespace commsAssemble the Required Functionality
Before parsing the options and assembling the right functionality there is a need to start with basic integer value functionality:
namespace comms
{
template <typename TFieldBase, typename TValueType>
class BasicIntValue : public TFieldBase
{
public:
using ValueType = TValueType;
... // rest of the interface
private:
ValueType m_value;
};
} // namespace commsSuch field receives its base class and the type of the value it stores. The implementation of read/write/length functionalities are very basic and straightforward.
Now, we need to prepare various adaptor classes that will wrap or replace the existing interface functions:
namespace comms
{
template <std::intmax_t TOffset, typename TNext>
class SerOffsetAdaptor
{
public:
... // public interface
private:
TNext m_next;
};
template <std::size_t TLen, typename TNext>
class FixedLengthAdaptor
{
public:
... // public interface
private:
TNext m_next;
};
... // and so on
} // namespace commsNOTE, that the adaptor classes above wrap one another (TNext template
parameter) and either replace or forward the read/write/length operations to the next
adaptor or final BasicIntValue class, instead of using inheritance as it was
with message interface and implementation chunks. The overall architecture
presented in this book doesn’t require the field classes to exhibit polymorphic
behaviour. That’s why using inheritance between adaptors is not necessary, although
not forbidden either. Using inheritance instead of containment has its pros and
cons, and at the end it’s a matter of personal taste of what to use.
Now it’s time to use the parsed options and wrap the BasicIntValue with
required adaptors:
Wrap with SerOffsetAdaptor if needed
namespace comms
{
template <typename TField, typename TOpts, bool THasSerOffset>
struct AdaptBasicFieldSerOffset;
template <typename TField, typename TOpts>
struct AdaptBasicFieldSerOffset<TField, TOpts, true>
{
using Type = SerOffsetAdaptor<TOpts::SerOffset, TField>;
};
template <typename TField, typename TOpts>
struct AdaptBasicFieldSerOffset<TField, TOpts, false>
{
using Type = TField;
};
} // namespace commsWrap with FixedLengthAdaptor if needed
namespace comms
{
template <typename TField, typename TOpts, bool THasFixedLength>
struct AdaptBasicFieldFixedLength;
template <typename TField, typename TOpts>
struct AdaptBasicFieldFixedLength<TField, TOpts, true>
{
using Type = FixedLengthAdaptor<TOpts::FixedLength, TField>;
};
template <typename TField, typename TOpts>
struct AdaptBasicFieldFixedLength<TField, TOpts, false>
{
using Type = TField;
};
} // namespace commsAnd so on for all other possible adaptors.
Now, let’s bundle all the required adaptors together:
namespace comms
{
template <typename TBasic, typename... TOptions>
sturct FieldBuilder
{
using ParsedOptions = FieldParsedOptions<TOptions...>;
using Field1 = typename AdaptBasicFieldSerOffset<
TBasic, ParsedOptions, ParsedOptions::HasSerOffset>::Type;
using Field2 = typename AdaptBasicFieldFixedLength<
Field1, ParsedOptions, ParsedOptions::HasFixedLengthLimit>::Type;
using Field3 = ...
...
using FieldN = ...
using Type = FieldN;
};
} // namespace commsThe final stage is to actually define final IntValueField type:
namespace comms
{
template <typename TBase, typename TValueType, typename... TOptions>
class IntValueField
{
using Basic = BasicIntValue<TBase, TValueType>;
using Adapted = typename FieldBuilder<Basic, TOptions...>::Type;
public:
using ValueType = typename Adapted::ValueType;
// Just forward all the API requests to the adapted field.
ValueType& value()
{
return m_adapted.value();
}
const ValueType& value() const
{
return m_adapted.value();
}
template <typename TIter>
ErrorStatus read(TIter& iter, std::size_t len)
{
return m_adapted.read(iter, len);
}
...
private:
Adapted m_adapted;
};
} // namespace commsThe definition of the year field which is serialised using offset from
year 2000 may be defined as:
using MyFieldBase = comms::Field<false>; // use big endian
using MyYear = comms::IntValueField<
MyFieldBase,
std::uint16_t, // store as 2 bytes unsigned value
comms::option::NumValueSerOffset<-2000>,
comms::option::FixedLength(1)
>;Other Options
In addition to options that regulate the read/write behaviour, there can be options which influence how the field is created and/or handled afterwards.
For example, there may be a need to set a specific value when the field object is created (using default constructor). Let’s introduce a new options for this purpose:
namespace comms
{
namespace option
{
template <typename T>
struct DefaultValueInitialiser{};
} // namespace option
} // namespace commsThe template parameter provided to this option is expected to be a class/struct with the following interface:
struct DefaultValueSetter
{
template <typename TField>
void operator()(TField& field) const
{
field.value() = ...; // Set the custom value
}
}Then the relevant adaptor class may set the default value of the field using the provided setter class:
namespace comms
{
template <typename TSetter, typename TNext>
class DefaultValueInitAdaptor
{
public:
using ValueType = typename TNext::ValueType;
DefaultValueInitAdaptor()
{
TSetter()(*this);
}
ValueType& value()
{
return m_next.value();
}
...
private:
TNext m_next;
};
} // namespace commsPlease note, that both comms::option::DefaultValueInitialiser option and
DefaultValueInitAdaptor adaptor class are completely generic, and
they can be used with any type of the field.
For numeric fields, such as IntValueField defined earlier, the generic library
may provide built-in setter class:
namespace comms
{
template<std::intmax_t TVal>
struct DefaultNumValueInitialiser
{
template <typename TField>
void operator()(TField& field)
{
using FieldType = typename std::decay<TField>::type;
using ValueType = typename FieldType::ValueType;
field.value() = static_cast<ValueType>(TVal);
}
};
} // namespace commsAnd then, create a convenience alias to DefaultValueInitialiser option which
receives a numeric value as its template parameter and insures that the
field’s value is initialised accordingly:
namespace comms
{
namespace option
{
template<std::intmax_t TVal>
using DefaultNumValue = DefaultValueInitialiser<details::DefaultNumValueInitialiser<TVal> >;
} // namespace option
} // namespace commsAs the result, the making the year field to be default constructed with
value 2016 may look like this:
using MyFieldBase = comms::Field<false>; // use big endian
using MyYear = comms::IntValueField<
MyFieldBase,
std::uint16_t, // store as 2 bytes unsigned value
comms::option::NumValueSerOffset<-2000>,
comms::option::FixedLength<1>,
comms::option::DefaultNumValue(2016)
>;Other Fields
The Common Field Types chapter mentions multiple other fields and several different ways to serialise them. I’m not going to describe each and every one of them here. Instead, I’d recommend taking a look at the documentation of the COMMS library which was implemented using ideas from this book. It will describe all the fields it implements and their options.
Eliminating Dynamic Memory Allocation
Fields like String or List may contain variable number of characters/elements.
The default internal value storage type for such fields will probably be
std::string or std::vector respectively. It will do the job, mostly. However,
they may not be suitable for bare-metal products that cannot use dynamic
memory allocation and/or exceptions. In this case there must be a way to
easily substitute these types with alternatives, such as custom StaticString or
StaticVector types.
Let’s define a new option that will provide fixed storage size and will force
usage of these custom types instead of std::string and std::vector.
namespace comms
{
namespace option
{
template <std::size_t TSize>
struct FixedSizeStorage {};
} // namespace option
} // namespace commsThe parsed option structure needs to be extended with new information:
namespace comms
{
template <typename... TOptions>
struct FieldParsedOptions;
template <>
struct FieldParsedOptions<>
{
...
static const bool HasFixedSizeStorage = false;
}
template <std::size_t TSize, typename... TOptions>
struct FieldParsedOptions<option::FixedSizeStorage<TSize>, TOptions...> :
public FieldParsedOptions<TOptions...>
{
static const bool HasFixedSizeStorage = true;
static const std::size_t FixedSizeStorage = TSize;
};
} // namespace commsNow, let’s implement the logic of choosing StaticString as the value storage
type if the option above is used and choosing std::string if not.
// TOptions is a final variant of FieldParsedOptions<...>
template <typename TOptions, bool THasFixedStorage>
struct StringStorageType;
template <typename TOptions>
struct StringStorageType<TOptions, true>
{
typedef comms::util::StaticString<TOptions::FixedSizeStorage> Type;
};
template <typename TOptions>
struct StringStorageType<TOptions, false>
{
typedef std::string Type;
};
template <typename TOptions>
using StringStorageTypeT =
typename StringStorageType<TOptions, TOptions::HasFixedSizeStorage>::Type;comms::util::StaticString is the implementation of a string management class,
which exposes the same public interface as std::string. It receives the fixed size
of the storage area as a template parameter, uses std::array or similar as its private
data member the store the string characters.
The implementation of the String field may look like this:
template <typename TBase, typename... TOptions>
class StringField
{
public:
// Parse the option into the struct
using ParsedOptions = FieldParsedOptions<TOptions...>;
// Identify storage type: StaticString or std::string
using ValueType = StringStorageTypeT<ParsedOptions>;
// Use the basic field and wrap it with adapters just like IntValueField earlier
using Basic = BasicStringValue<TBase, ValueType>;
using Adapted = typename FieldBuilder<Basic, TOptions...>::Type;
// Just forward all the API requests to the adapted field.
ValueType& value()
{
return m_adapted.value();
}
const ValueType& value() const
{
return m_adapted.value();
}
template <typename TIter>
ErrorStatus read(TIter& iter, std::size_t len)
{
return m_adapted.read(iter, len);
}
...
private:
Adapted m_adapted;
};
} // namespace commsAs the result the definition of the message with a string field that doesn’t use dynamic memory allocation may look like this:
template <typename TFieldBase>
using ActualMessage3Fields = std::tuple<
comms::StringField<TFieldBase, comms::option::FixedStorageSize<128> >,
...
>:
template <typename TMsgInterface>
class ActualMessage3 : public
comms::MessageBase<
comms::option::FieldsImpl<ActualMessage3Fields<typename TMsgInterface::Field> >,
...
>
{
};And what about the case, when there is a need to create a message with a
string field, but substitute the underlying default std::string type with
StaticString only when compiling the bare-metal application? In this
case the ActualMessage3 class may be defined to have additional template
parameter which will determine the necessity to substitute the storage type.
template <bool THasFixedSize>
struct StringExtraOptions
{
using Type = comms::option::EmtpyOption; // doesn't do anything
};
template <>
struct StringExtraOptions<false>
{
using Type = comms::option::FixedStorageSize<128> >; // forces static storage
};
template <typename TFieldBase, bool THasFixedSize>
using ActualMessage3Fields = std::tuple<
comms::StringField<TFieldBase, typename StringExtraOptions<THasFixedSize>::Type>,
...
>:
template <typename TMsgInterface, bool THasFixedSize = false>
class ActualMessage3 : public
comms::MessageBase<
comms::option::FieldsImpl<ActualMessage3Fields<typename TMsgInterface::Field, THasFixedSize> >,
...
>
{
};Thanks to the fact that StaticString and std::string classes expose the
same public interface, the message handling function doesn’t need to worry about
actual storage type. It just uses public interface of std::string:
class MsgHandler
{
public:
void handle(ActualMessage3& msg)
{
auto& fields = msg.fields();
auto& stringField = std::get<0>(fields);
// The type of the stringVal is either std::string or StaticString
auto& stringVal = stringField.value();
if (stringVal == "string1") {
... // do something
}
else if (stringVal == "string2") {
... // do something else
}
}
};Choosing internal value storage type for List fields to be
std::vector or StaticVector is very similar.
Transport
In addition to definition of the messages and their contents, every communication protocol must ensure that the message is successfully delivered over the I/O link to the other side. The serialised message payload must be wrapped in some kind of transport information, which usually depends on the type and reliability of the I/O link being used. For example, protocols that are designed to be used over TCP/IP connection, such as MQTT, may omit the whole packet synchronisation and checksum logic, because TCP/IP connection ensures that the data is delivered correctly. Such protocols are usually defined to use only message ID and remaining size information to wrap the message payload:
ID | SIZE | PAYLOADOther protocols may be designed to be used over less reliable RS-232 link, which may require a bit better protection against data loss or corruption:
SYNC | SIZE | ID | PAYLOAD | CHECKSUMThe number of most common types of the wrapping "chunks" is quite small. However, different protocols may have different rules of how these values are serialised. Very similar to Fields.
The main logic of processing the incoming raw data remains the same for all the protocols, though. It is to read and process the transport information "chunks" one by one:
-
SYNC - check the next one or more bytes for an expected predefined value. If the value is as expected proceed to the next "chunk". If not, drop one byte from the front of the incoming data queue and try again.
-
SIZE - compare the remaining expected data length against actually available. If there is enough data, proceed to the next "chunk". If not report, to the caller, that more data is required.
-
ID - read the message ID value and create appropriate message object, then proceed to the next "chunk".
-
PAYLOAD - let the created message object to read its payload data.
-
CHECKSUM - read the expected checksum value and calculate the actual one. If the checksums don’t match, discard the created message and report error.
Each and every "chunk" operates independently, regardless of what information was processed before and/or after it. When some operation seems to repeat itself several times, it should be generalised and become part of our Generic Library.
So, how is it going to be implemented? My advice is to use independent "chunk" classes, that expose predefined interface, wrap one another, and forward the requested operation to the next "chunk" when appropriate. As was stated earlier, the transport information values are very similar to Fields, which immediately takes us to the direction of reusing Field classes to handle these values:
template <typename TField, typename TNextChunk, ... /* some other template parameters */>
class SomeChunk
{
public:
// Iterator used for reading
using ReadIterator = typename TNextChunk::ReadIterator;
// Iterator used for writing
using WriteIterator = typename TNextChunk::WriteIterator;
// Type of the common message interface class
using Message = typename TNextChunk::Message;
// Smart pointer used to hold newly created message object
using MsgPtr = typename TNextChunk::MsgPtr;
ErrorStatus read(MsgPtr& msg, ReadIterator& iter, std::size_t len)
{
TField field;
auto es = field.read(iter, len);
if (es != ErrorStatus::Success) {
return es;
}
... process field value.
return m_next.read(msg, iter, len - field.length());
}
ErrorStatus write(const Message& msg, WriteIterator& iter, std::size_t len)
{
TField field;
field.value() = ...; // set required value
auto es = field.write(iter, len);
if (es != ErrorStatus) {
return es;
}
return m_next.write(msg, iter, len - field.length());
}
private:
TNextChunk m_next;
}Please note that ReadIterator and WriteIterator are taken from the next
chunk. One of the chunks, which is responsible for processing the PAYLOAD will
receive the class of the message interface as a template parameter, will
retrieve the information of the iterators' types, and redefine them as its
internal types. Also, this class will define the type of the message interface as
its internal Message type.
All other wrapping chunk classes will reuse the same information.
Also note, that one of the chunks will have to define pointer to the created
message object (MsgPtr). Usually it is the chunk that is responsible to process ID
value.
The sequential processing the transport information "chunks", and stripping them one by one before proceeding to the next one, may remind of OSI Conceptual Model, where a layer serves the layer above it and is served by the layer below it.
From now on, I will use a term layer instead of the chunk. The combined bundle of such layers will be called protocol stack (of layers).
Let’s take a closer look at all the layer types mentioned above.
PAYLOAD Layer
Processing of the PAYLOAD is always the last stage in the protocol stack.
All previous layers have successfully processed their transport data, the
message object was created and is ready to read its fields encoded in the PAYLOAD.
Such layer must receive type of the message interface class as a template parameter and redefine read/write iterator types.
namespace comms
{
template <typename TMessage>
class MsgDataLayer
{
public:
// Define type of the message interface
using Message = TMessage;
// Type of the pointer to message is not defined yet, will be defined in
// the layer that processes message ID
using MsgPtr = void;
// ReadIterator is the same as Message::ReadIterator if such exists, void
// otherwise.
using ReadIterator = typename std::conditional<
Message::InterfaceOptions::HasReadIterator,
typename TMessage::ReadIterator,
void
>::type;
// WriteIterator is the same as Message::WriteIterator if such exists, void
// otherwise.
using WriteIterator = typename std::conditional<
Message::InterfaceOptions::HasWriteIterator,
typename TMessage::WriteIterator,
void
>::type WriteIterator;
...
};
} // namespace commsThe read/write operations just forward the request the message object.
namespace comms
{
template <typename TMessage>
class MsgDataLayer
{
public:
template <typename TMsgPtr>
static ErrorStatus read(
TMsgPtr& msgPtr,
ReadIterator& iter,
std::size_t len)
{
return msgPtr->read(iter, len);
}
static ErrorStatus write(
const Message& msg,
WriteIterator& iter,
std::size_t len)
{
return msg.write(iter, len);
}
};
} // namespace commsPlease note that read() member function expects to receive a reference to
the smart pointer, which holds allocated message object, as the first parameter.
The type of the pointer is not known yet.
As the result, type of such pointer is provided via
template parameter.
ID Layer
The job of this layer is handle the message ID information.
-
When new message is received, appropriate message object needs to be created, prior to invoking read operation of the next (wrapped) layer.
-
When any message is about to get sent, just get the ID information from the message object and serialise it prior to invoking the write operation of the next layer.
The code of the layer is pretty straightforward:
namespace comms
{
// TField is type of the field used to read/write message ID
// TNext is the next layer this one wraps
template <typename TField, typename TNext, ... /* other parameters */>
class MsgIdLayer
{
public:
// Type of the field object used to read/write message ID value.
using Field = TField;
// Take type of the ReadIterator from the next layer
using ReadIterator = typename TNext::ReadIterator;
// Take type of the WriteIterator from the next layer
using WriteIterator = typename TNext::WriteIterator;
// Take type of the message interface from the next layer
using Message = typename TNext::Message;
// Type of the message ID
using MsgIdType = typename Message::MsgIdType;
// Redefine pointer to message type (described later)
using MsgPtr = ...;
ErrorStatus read(MsgPtr& msgPtr, ReadIterator& iter, std::size_t len)
{
Field field;
auto es = field.read(iter, len);
if (es != ErrorStatus::Success) {
return es;
}
msgPtr = createMsg(field.value()); // create message object based on ID
if (!msgPtr) {
// Unknown ID
return ErrorStatus::InvalidMsgId;
}
es = m_next.read(iter, len - field.length());
if (es != ErrorStatus::Success) {
msgPtr.reset(); // Discard allocated message;
}
return es;
}
ErrorStatus write(const Message& msg, WriteIterator& iter, std::size_t len) const
{
Field field;
field.value() = msg.id();
auto es = field.write(iter, len);
if (es != ErrorStatus::Success) {
return es;
}
return m_next.write(msg, iter, len - field.length());
}
private:
MsgPtr createMsg(MsgIdType id)
{
... // TODO: create message object (described later)
}
TNext m_next;
};
} // namespace commsTo properly finalise the implementation above we need to resolve two main challenges:
- Implement createMsg() function which receives ID of the message and
creates the message object.
- Define the MsgPtr smart pointer type, which is responsible to hold the
allocated message object. In most cases defining it to be
std::unique_ptr<Message> will do the job. However, the main problem here is usage of dynamic memory
allocation. Bare metal platform may not have such luxury. There must be a
way to support
"in place" allocation as well.
Creating Message Object
Let’s start with creation of proper message object, given the numeric message ID. It must be as efficient as possible.
In many cases the IDs of the messages are sequential ones and defined using some enumeration type.
enum MsgId
{
MsgId_Message1,
MsgId_Message2,
...
MsgId_NumOfMessages
};Let’s assume that we have FactoryMethod class with polymorphic createMsg()
function, that returns allocated message object wrapped in a MsgPtr smart pointer.
class FactoryMethod
{
public:
MsgPtr createMsg() const
{
return createMsgImpl();
}
protected:
virtual MsgPtr createMsgImpl() const = 0;
};In this case, the most efficient way is to have an array of pointers to
polymorphic class FactoryMethod. The index of the array cell corresponds to
a message ID.
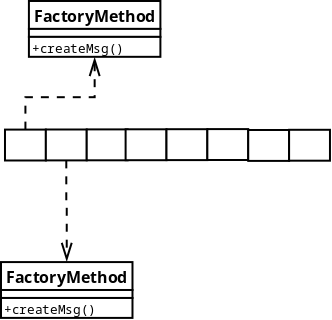
The code of MsgIdLayer::createMsg() function is quite simple:
namespace comms
{
template <...>
class MsgIdLayer
{
private:
MsgPtr createMsg(MsgIdType id)
{
auto& registry = ...; // reference to the array of pointers to FactoryMethod-s
if ((registry.size() <= id) ||
(registry[id] == nullptr)){
return MsgPtr();
}
return registry[id]->createMsg();
}
};
} // namespace commsThe runtime complexity
of such code is O(1).
However, there are many protocols that their ID map is quite sparse and it is impractical to use an array for direct mapping:
enum MsgId
{
MsgId_Message1 = 0x0101,
MsgId_Message2 = 0x0205,
MsgId_Message3 = 0x0308,
...
MsgId_NumOfMessages
};In this case the array of FactoryMethod-s described earlier must be packed and
binary search algorithm
used to find required method. To support such search, the FactoryMethod must
be able to report ID of the messages it creates.
class FactoryMethod
{
public:
MsgIdType id() const
{
return idImpl();
}
MsgPtr createMsg() const
{
return createMsgImpl();
}
protected:
virtual MsgIdType idImpl() const = 0;
virtual MsgPtr createMsgImpl() const = 0;
};Then the code of MsgIdLayer::createMsg() needs to apply binary search to find
the required method:
namespace comms
{
template <...>
class MsgIdLayer
{
private:
MsgPtr createMsg(MsgIdType id)
{
auto& registry = ...; // reference to the array of pointers to FactoryMethod-s
auto iter =
std::lower_bound(
registry.begin(), registry.end(), id,
[](FactoryMethod* method, MsgIdType idVal) -> bool
{
return method->id() < idVal;
});
if ((iter == registry.end()) ||
((*iter)->id() != id)) {
return MsgPtr();
}
return (*iter)->createMsg();
}
};
} // namespace commsNote, that std::lower_bound
algorithm requires FactoryMethod-s in the
"registry" to be sorted by the message ID. The runtime
complexity
of such code is O(log(n)), where n is size of the registry.
Some communication protocols define multiple variants of the same message, which
are differentiated by some other means, such as serialisation length of the message.
It may be convenient to implement such variants as separate message classes, which
will require separate FactoryMethod-s to instantiate them. In this case,
the MsgIdLayer::createMsg() function may use
std::equal_range
algorithm instead of
std::lower_bound, and
use additional parameter to specify which of the methods to pick from the equal
range found:
namespace comms
{
template <...>
class MsgIdLayer
{
private:
MsgPtr createMsg(MsgIdType id, unsigned idx = 0)
{
auto& registry = ...; // reference to the array of pointers to FactoryMethod-s
auto iters = std::equal_range(...);
if ((iters.first == iters.second) ||
(iters.second < (iters.first + idx))) {
return MsgPtr();
}
return (*(iter.first + idx))->createMsg();
}
};
} // namespace commsPlease note, that MsgIdLayer::read() function also needs to be modified to
support multiple attempts to create message object with the same id.
It must increment the idx parameter, passed to createMsg() member function,
on every failing attempt to read the message contents, and try again
until the found equal range is exhausted. I leave the implementation of
this extra logic as an exercise to the reader.
To complete the message allocation subject we need to come up with an automatic
way to create the registry of FactoryMethod-s used earlier. Please remember,
that FactoryMethod was just a polymorphic interface. We need to implement
actual method that implements the virtual functionality.
template <typename TActualMessage>
class ActualFactoryMethod : public FactoryMethod
{
protected:
virtual MsgIdType idImpl() const
{
return TActualMessage::ImplOptions::MsgId;
}
virtual MsgPtr createMsgImpl() const
{
return MsgPtr(new TActualMessage());
}
}Note, that the code above assumes that comms::option::StaticNumIdImpl
option (described in Generalising Message Implementation chapter)
was used to specify numeric message ID
when defining the ActualMessage* class.
Also note, that the example above uses dynamic memory allocation to allocate actual message object. This is just for idea demonstration purposes. The Allocating Message Object section below will describe how to support "in-place" allocation.
The types of the messages, that can be received over I/O link, are usually known
at compile time. If we bundle them together in std::tuple, it is easy to
apply already familiar meta-programming technique of iterating over the provided
types and instantiate proper ActualFactoryMethod<> object.
using AllMessages = std::tuple<
ActualMessage1,
ActualMessage2,
ActualMessage3,
...
>;The size of the registry can easily be identified using std::tuple_size.
static const RegistrySize = std::tuple_size<AllMessages>::value;
using Registry = std::array<FactoryMethod*, RegistrySize>;
Registry m_registry; // registry objectNow it’s time to iterate (at compile time) over all the types defined in
the AllMessages tuple and create separate ActualFactoryMethod<> for
each and every one of them. Remember tupleForEach? We need
something similar here, but missing the tuple object itself. We are just iterating
over types, not the elements of the tuple object. We’ll call it
tupleForEachType(). See Appendix D - tupleForEachType for implementation details.
We also require a functor class that will be invoked for every message type and will be responsible to fill the provided registry:
class MsgFactoryCreator
{
public:
MsgFactoryCreator(Registry& registry)
: registry_(registry)
{
}
template <typename TMessage>
void operator()()
{
static const ActualFactoryMethod<TMessage> Factory;
registry_[idx_] = &Factory;
++idx_;
}
private:
Registry& registry_;
unsigned idx_ = 0;
};The initialisation function may be as simple as:
void initRegistry()
{
tupleForEachType<AllMessages>(MsgFactoryCreator(m_registry));
}NOTE, that ActualFactoryMethod<> factories do not have any internal state and
are defined as static objects. It is safe just to store pointers to them in
the registry array.
To summarise this section, let’s redefine comms::MsgIdLayer and add
the message creation functionality.
namespace comms
{
// TField is type of the field used to read/write message ID
// TAllMessages is all messages bundled in std::tuple.
// TNext is the next layer this one wraps
template <typename TField, typename TAllMessages, typename TNext>
class MsgIdLayer
{
public:
// Type of the field object used to read/write message ID value.
using Field = TField;
// Take type of the ReadIterator from the next layer
using ReadIterator = typename TNext::ReadIterator;
// Take type of the WriteIterator from the next layer
using WriteIterator = typename TNext::WriteIterator;
// Take type of the message interface from the next layer
using Message = typename TNext::Message;
// Type of the message ID
using MsgIdType = typename Message::MsgIdType;
// Redefine pointer to message type:
using MsgPtr = ...;
// Constructor
MsgIdLayer()
{
tupleForEachType<AllMessages>(MsgFactoryCreator(m_registry));
}
// Read operation
ErrorStatus read(MsgPtr& msgPtr, ReadIterator& iter, std::size_t len) {...}
// Write operation
ErrorStatus write(const Message& msg, WriteIterator& iter, std::size_t len) const {...}
private:
class FactoryMethod {...};
template <typename TMessage>
class ActualFactoryMethod : public FactoryMethod {...};
class MsgFactoryCreator {...};
// Registry of Factories
static const auto RegistrySize = std::tuple_size<TAllMessages>::value;
using Registry = std::array<FactoryMethod*, RegistrySize>;
// Create message
MsgPtr createMsg(MsgIdType id, unsigned idx = 0)
{
auto iters = std::equal_range(m_registry.begin(), m_registry.end(), ...);
...
}
Registry m_registry;
TNext m_next;
};
} // namespace commsAllocating Message Object
At this stage, the only missing piece of information is definition of the
smart pointer type responsible to hold the allocated message object (MsgPtr)
and allowing "in place" allocation instead of using dymaic memory.
When dynamic memory allocation is allowed, everything is simple, just use
std::unique_ptr with standard deleter. However, it is a bit more difficult
when such allocations are not allowed.
Let’s start with the calculation of the buffer size which is big enough to
hold any message in the provided AllMessages bundle. It is similar to the
size of the union below.
union AllMessagesU
{
ActualMessage1 msg1;
ActualMessage2 msg2;
...
};However, all the required message types are provided as std::tuple, not
as union. What we need is something like
std::aligned_union, but
for the types already bundled in std::tuple. It turns out it is very easy to
implement using template specialisation:
template <typename TTuple>
struct TupleAsAlignedUnion;
template <typename... TTypes>
struct TupleAsAlignedUnion<std::tuple<TTypes...> >
{
using Type = typename std::aligned_union<0, TTypes...>::type;
};NOTE, that some compilers (gcc v5.0 and below) may not implement
std::aligned_union type, but they do implement
std::aligned_storage.
The Appendix E - AlignedUnion shows how to implement aligned union
functionality using std::aligned_storage.
The "in place" allocation area, that can fit in any message type listed in
AllMessages tuple, can be defined as:
using InPlaceStorage = typename TupleAsAlignedUnion<AllMessages>::Type;The "in place" allocation is simple:
InPlaceStorage inPlaceStorage;
new (&inPlaceStorage) TMessage(); // TMessage is type of the message being created.The "in place" allocation requires "in place" deletion, i.e. destruction of the allocated element.
template <typename T>
struct InPlaceDeleter
{
void operator()(T* obj) {
obj->~T();
}
};The smart pointer to Message interface class may be defined as
std::unique_ptr<Message, InPlaceDeleter<Message> >.
Now, let’s define two independent allocation policies with the similar interface. One for dynamic memory allocation, and the other for "in place" allocation.
template <typename TMessageInterface>
struct DynMemAllocationPolicy
{
using MsgPtr = std::unique_ptr<TMessageInterface>;
template <typename TMessage>
MsgPtr allocMsg()
{
return MsgPtr(new TMessage());
}
}
template <typename TMessageInterface, typename TAllMessages>
class InPlaceAllocationPolicy
{
public:
template <typename T>
struct InPlaceDeleter {...};
using MsgPtr = std::unique_ptr<TMessageInterface, InPlaceDeleter<TMessageInterface> >;
template <typename TMessage>
MsgPtr allocMsg()
{
new (&m_storage) TMessage();
return MsgPtr(
reinterpret_cast<TMessageInterface*>(&m_storage),
InPlaceDeleter<TMessageInterface>());
}
private:
using InPlaceStorage = typename TupleAsAlignedUnion<TAllMessages>::Type;
InPlaceStorage m_storage;
}Please pay attention, that the implementation of InPlaceAllocationPolicy is
the simplest possible one. In production quality code, it is recommended to insert
protection against double allocation
in the used storage area, by introducing boolean flag indicating, that the
storage area is or isn’t free. The pointer/reference to such flag must also be
passed to the deleter object, which is responsible to update it when deletion takes
place.
The choice of the allocation policy used in comms::MsgIdLayer may be implemented
using the already familiar technique of using options.
namespace comms
{
template <
typename TField,
typename TAllMessages,
typename TNext,
typename... TOptions>
class MsgIdLayer
{
...
};
} // namespace commsIf no option is specified, the DynMemAllocationPolicy must be chosen. To
force "in place" message allocation a separate option may be defined and
passed as template parameter to comms::MsgIdLayer.
namespace comms
{
namespace option
{
struct InPlaceAllocation {};
} // namespace option
} // namespace commsUsing the familiar technique of options parsing, we can create a structure,
where a boolean value HasInPlaceAllocation defaults to false and can be
set to true, if the option mentioned above is used. As the result, the policy choice
may be implemented as:
namespace comms
{
template <
typename TField,
typename TAllMessages,
typename TNext,
typename... TOptions>
class MsgIdLayer
{
public:
// TOptions parsed into struct
using ParsedOptions = ...;
// Take type of the message interface from the next layer
using Message = typename TNext::Message;
// Choice of the allocation policy
using AllocPolicy = typename std::conditional<
ParsedOptions::HasInPlaceAllocation,
InPlaceAllocationPolicy<Message, TAllMessages>,
DynMemAllocationPolicy<Message>
>::type;
// Redefine pointer to message type
using MsgPtr = typename AllocPolicy::MsgPtr;
...
private:
AllocPolicy m_policy;
};
} // namespace commsWhat remains to be done is to provide the ActualFactoryMethod<> class with
an ability to use allocation policy for allocating the message. Please
remember, that ActualFactoryMethod<> objects are stateless static ones. It
means that the allocation policy object needs to passed as the parameter to
its allocation function.
namespace comms
{
template <
typename TField,
typename TAllMessages,
typename TNext,
typename... TOptions>
class MsgIdLayer
{
public:
// Choice of the allocation policy
using AllocPolicy = ...;
// Redefine pointer to message type
using MsgPtr = typename AllocPolicy::MsgPtr;
...
private:
class FactoryMethod
{
public:
MsgPtr createMsg(AllocPolicy& policy) const
{
return createMsgImpl(policy);
}
protected:
virtual MsgPtr createMsgImpl(AllocPolicy& policy) const = 0;
};
template <typename TActualMessage>
class ActualFactoryMethod : public FactoryMethod
{
protected:
virtual MsgPtr createMsgImpl(AllocPolicy& policy) const
{
return policy.allocMsg<TActualMessage>();
}
}
AllocPolicy m_policy;
};
} // namespace commsSummary
The final implementation of the ID Layer (comms::MsgIdLayer) is a generic
piece of code. It receives a list of message classes, it must recognise,
as a template parameter. The whole logic of creating the right message object
given the numeric ID of the message is automatically generated by the compiler
using only static memory. When new message is added to the protocol, what needs
to be updated is the bundle of available message classes (AllMessages). Nothing
else is required. Recompilation of the sources will generate a code that
supports new message as well. The implementation of comms::MsgIdLayer
above has O(log(n)) runtime complexity of finding the right factory method
and creating appropriate message object. It also supports multiple variants
of the same message which are implemented as different message classes, but
report the same message ID. By default comms::MsgIdLayer uses dynamic
memory to allocate new message object. It can easily be changed by providing
comms::option::InPlaceAllocation option to it, which will force usage of
"in place" allocation. The "in place" allocation may create one message at
a time. In order to be able to create a new message object, the previous
one must be destructed and de-allocated before.
SIZE Layer
This layer is responsible to handle the remaining length information.
-
During read operation it reads the information about number of bytes required to complete the message deserialisation and compares it to the number of bytes available for reading. If input buffer has enough data, the read operation of the next (wrapped) layer is invoked.
-
During write operation, the layer must calculate and write the number of bytes required to serialise the message prior to invoking the write operation of the next (wrapped) layer.
namespace comms
{
// TField is type of the field used to read/write SIZE information
// TNext is the next layer this one wraps
template <typename TField, typename TNext>
class MsgSizeLayer
{
public:
// Type of the field object used to read/write SIZE information.
using Field = TField;
// Take type of the ReadIterator from the next layer
using ReadIterator = typename TNext::ReadIterator;
// Take type of the WriteIterator from the next layer
using WriteIterator = typename TNext::WriteIterator;
// Take type of the message interface from the next layer
using Message = typename TNext::Message;
// Take type of the message interface pointer from the next layer
using MsgPtr = typename TNext::MsgPtr;
template <typename TMsgPtr>
ErrorStatus read(TMsgPtr& msgPtr, ReadIterator& iter, std::size_t len)
{
Field field;
auto es = field.read(iter, len);
if (es != ErrorStatus::Success) {
return es;
}
auto actualRemainingSize = (len - field.length());
auto requiredRemainingSize = static_cast<std::size_t>(field.value());
if (actualRemainingSize < requiredRemainingSize) {
return ErrorStatus::NotEnoughData;
}
es = reader.read(msgPtr, iter, requiredRemainingSize);
if (es == ErrorStatus::NotEnoughData) {
return ErrorStatus::ProtocolError;
}
return es;
}
ErrorStatus write(const Message& msg, WriteIterator& iter, std::size_t len) const
{
Field field;
field.value() = m_next.length(msg);
auto es = field.write(iter, len);
if (es != ErrorStatus::Success) {
return es;
}
return m_next.write(msg, iter, len - field.length());
}
private:
TNext m_next;
};
} // namespace commsPlease note, that reference to the smart pointer holding the message object is passed to
the read() function using undefined type (template parameter) instead of
using the MsgPtr internal type.
Some communication protocols may serialise SIZE information before the ID,
others may do the opposite.
The SIZE layer is not aware of what other layers it wraps.
If ID information is
serialised before the SIZE, the MsgPtr type definition is probably taken
from PAYLOAD Layer, which is defined to be void.
Also note, that write() function requires knowledge of how many bytes it
will take to the next layer to serialise the message. It requires every layer
to define length(…) member function in addition to read() and write().
The length() member function of the PAYLOAD Layer may be defined
as:
namespace comms
{
template <typename TMessage>
class MsgDataLayer
{
public:
static constexpr std::size_t length(const TMessage& msg)
{
return msg.length();
}
};
} // namespace commsThe length() member function of the ID Layer may be defined
as:
namespace comms
{
template <
typename TField,
typename TAllMessages,
typename TNext,
typename... TOptions>
class MsgIdLayer
{
public:
std::size_t length(const Message& msg) const
{
TField field;
field.value() = msg.id();
return field.length() + m_next.length(msg);
}
};
} // namespace commsAnd the length() member function of the SIZE Layer itself may be defined
as:
namespace comms
{
template <typename TField, typename TNext>
class MsgSizeLayer
{
public:
std::size_t length(const Message& msg) const
{
TField field;
field.value() = m_next.length(msg);
return field.length() + field.value();
}
};
} // namespace commsSYNC Layer
This layer is responsible to find and validate the synchronisation prefix.
namespace comms
{
// TField is type of the field used to read/write SYNC prefix
// TNext is the next layer this one wraps
template <typename TField, typename TNext>
class SyncPrefixLayer
{
public:
// Type of the field object used to read/write SYNC prefix.
using Field = TField;
// Take type of the ReadIterator from the next layer
using ReadIterator = typename TNext::ReadIterator;
// Take type of the WriteIterator from the next layer
using WriteIterator = typename TNext::WriteIterator;
// Take type of the message interface from the next layer
using Message = typename TNext::Message;
// Take type of the message interface pointer from the next layer
using MsgPtr = typename TNext::MsgPtr;
template <typename TMsgPtr>
ErrorStatus read(TMsgPtr& msgPtr, ReadIterator& iter, std::size_t len)
{
Field field;
auto es = field.read(iter, len);
if (es != ErrorStatus::Success) {
return es;
}
if (field.value() != Field().value()) {
// doesn't match expected
return ErrorStatus::ProtocolError;
}
return m_next.read(msgPtr, iter, len - field.length());
}
ErrorStatus write(const Message& msg, WriteIterator& iter, std::size_t len) const
{
Field field;
auto es = field.write(iter, len);
if (es != ErrorStatus::Success) {
return es;
}
return m_next.write(msg, iter, len - field.length());
}
std::size_t length(const TMessage& msg) const
{
return Field().length() + m_next.length(msg);
}
private:
TNext m_next;
};
} // namespace commsNote, that the value of the SYNC prefix is expected to be equal to the value
of the default constructed TField field type. The default construction value
may be set using comms::option::DefaultNumValue option described in
Generalising Fields Implementation chapter.
For example, 2 bytes synchronisation prefix 0xab 0xcd with big endian
serialisation may be defined as:
using CommonFieldBase = comms::Field<false>; // big endian serialisation base
using SyncPrefixField =
comms::IntValueField<
CommonFieldBase,
std::uint16_t,
comms::option::DefaultNumValue<0xabcd>
>;CHECKSUM Layer
This layer is responsible to calculate and validate the checksum information.
-
During read operation it remembers the initial value of the read iterator, then invokes the read operation of the next (wrapped) layer. After the next layer reports successful completion of its read operation, the expected checksum value is read. Then, the real checksum on the read data bytes is calculated and compered to the expected one. If the values match, the read operation is reported as successfully complete. If not, the created message object is deleted and error reported.
-
During write operation it lets the next (wrapped) layer to finish its writing, calculates the checksum value on the written data bytes, and writes the result into output buffer.
Before jumping into writing the code, there is a need to be aware of couple of issues:
-
The generic code of the CHECKSUM Layer mustn’t depend on any particular checksum calculation algorithm. I’d recommend providing the calculator class as a template parameter,
operator()of which is responsible to implement the checksum calculation logic. -
The checksum calculation after write operation requires the iterator to go back and calculate the checksum on the written data bytes. It can easily be done when used iterator is random access one. Sometimes it may not be the case (for example the output data is written into std::vector using std::back_insert_iterator). There is a need to have a generic way to handle such cases.
Implementing Read
Let’s start with implementing the read first.
namespace comms
{
// TField is type of the field used to read/write checksum value
// TCalc is generic class that is responsible to implement checksum calculation logic
// TNext is the next layer this one wraps
template <typename TField, typename TCalc, typename TNext>
class ChecksumLayer
{
public:
// Type of the field object used to read/write SYNC prefix.
using Field = TField;
// Take type of the ReadIterator from the next layer
using ReadIterator = typename TNext::ReadIterator;
// Take type of the WriteIterator from the next layer
using WriteIterator = typename TNext::WriteIterator;
// Take type of the message interface from the next layer
using Message = typename TNext::Message;
// Take type of the message interface pointer from the next layer
using MsgPtr = typename TNext::MsgPtr;
template <typename TMsgPtr>
ErrorStatus read(TMsgPtr& msgPtr, ReadIterator& iter, std::size_t len)
{
Field field;
if (len < field.length()) {
return ErrorStatus::NotEnoughData;
}
auto fromIter = iter; // The read is expected to use random-access iterator
auto es = m_next.read(iter, len - field.length());
if (es != ErrorStatus::Success) {
return es;
}
auto consumedLen = static_cast<std::size_t>(std::distance(fromIter, iter));
auto remLen = len - consumedLen;
es = field.read(iter, remLen);
if (es != ErrorStatus::Success) {
msgPtr.reset();
return es;
}
auto checksum = TCalc()(fromIter, consumedLen);
auto expectedValue = field.value();
if (expectedValue != checksum) {
msgPtr.reset(); // Delete allocated message
return ErrorStatus::ProtocolError;
}
return ErrorStatus::Success;
}
private:
TNext m_next;
};
} // namespace commsIt is clear that TCalc class is expected to have operator() member
function, which receives the iterator for reading and number of bytes
in the buffer.
As an example let’s implement generic total sum of bytes calculator:
namespace comms
{
template <typename TResult = std::uint8_t>
class BasicSumCalc
{
public:
template <typename TIter>
TResult operator()(TIter& iter, std::size_t len) const
{
using ByteType = typename std::make_unsigned<
typename std::decay<decltype(*iter)>::type
>::type;
auto checksum = TResult(0);
for (auto idx = 0U; idx < len; ++idx) {
checksum += static_cast<TResult>(static_cast<ByteType>(*iter));
++iter;
}
return checksum;
}
};
} // namespace commsImplementing Write
Now, let’s tackle the write problem. As it was mentioned earlier, there is a need to
recognise the type of the iterator used for writing and behave accordingly.
If the iterator is properly defined, the
std::iterator_traits
class will define iterator_category internal type.
using WriteIteratorCategoryTag =
typename std::iterator_traits<WriteIterator>::iterator_category;For random access iterators the WriteIteratorCategoryTag class will be
either std::random_access_iterator_tag
or any other class that inherits from it. Using this information, we can use
Tag Dispatch Idiom
to choose the right writing functionality.
namespace comms
{
template <...>
class ChecksumLayer
{
public:
using WriteIteratorCategoryTag =
typename std::iterator_traits<WriteIterator>::iterator_category;
ErrorStatus write(const Message& msg, WriteIterator& iter, std::size_t len) const
{
return writeInternal(msg, iter, len, WriteIteratorCategoryTag());
}
private:
ErrorStatus writeInternal(
const Message& msg,
WriteIterator& iter,
std::size_t len,
const std::random_access_iterator_tag&) const
{
return writeRandomAccess(msg, iter, len);
}
ErrorStatus writeInternal(
const Message& msg,
WriteIterator& iter,
std::size_t len,
const std::output_iterator_tag&) const
{
return writeOutput(msg, iter, len);
}
ErrorStatus writeRandomAccess(const Message& msg, WriteIterator& iter, std::size_t len) const
{
auto fromIter = iter;
auto es = m_next.write(msg, iter, len);
if (es != ErrorStatus::Success) {
return es;
}
auto consumedLen = static_cast<std::size_t>(std::distance(fromIter, iter));
auto remLen = len - consumedLen;
Field field;
field.value() = TCalc()(fromIter, consumedLen);
return field.write(iter, remLen);
}
ErrorStatus writeOutput(const Message& msg, WriteIterator& iter, std::size_t len) const
{
TField field;
auto es = m_next.write(msg, iter, len - field.length());
if (es != ErrorStatus::Success) {
return es;
}
field.write(iter, field.length());
return ErrorStatus::UpdateRequired;
}
TNext m_next;
};
} // namespace commsPlease pay attention, that writeOutput() function above is unable to
properly calculate the checksum of the written data. There is no way the
iterator can be reversed back and used as input instead of output. As the
result the function returns special error status: ErrorStatus::UpdateRequired.
It is an indication that the write operation is not complete and the
output should be updated using random access iterator.
Implementing Update
namespace comms
{
template <...>
class ChecksumLayer
{
public:
template <typename TIter>
ErrorStatus update(TIter& iter, std::size_t len) const
{
Field field;
auto fromIter = iter;
auto es = m_next.update(iter, len - field.length());
if (es != ErrorStatus::Success) {
return es;
}
auto consumedLen = static_cast<std::size_t>(std::distance(fromIter, iter));
auto remLen = len - consumedLen;
field.value() = TCalc()(fromIter, consumedLen);
es = field.write(iter, remLen);
return es;
}
private:
TNext m_next;
};
} // namespace commsPlease note, that every other layer must also implement the update() member
function, which will just advance the provided iterator by the number
of bytes required to write its field and invoke update() member function
of the next (wrapped) layer.
namespace comms
{
template <typename TMessage>
class MsgDataLayer
{
public:
template <typename TIter>
ErrorStatus update(TIter& iter, std::size_t len) const
{
std::advance(iter, len);
return ErrorStatus::Success;
}
};
} // namespace commsnamespace comms
{
template <...>
class MsgIdLayer
{
public:
template <typename TIter>
ErrorStatus update(TIter& iter, std::size_t len) const
{
TField field;
std::advance(iter, field.length());
return m_next.update(iter, len - field.length());
}
private:
TNext m_next;
};
} // namespace commsAnd so on for the rest of the layers. Also note, that the code above will work, only when the field has the same serialisation length for any value. If this is not the case (Base-128 encoding is used), the previously written value needs to be read, instead of just advancing the iterator, to make sure the iterator is advanced right amount of bytes:
template <typename TIter>
ErrorStatus update(TIter& iter, std::size_t len) const
{
TField field;
auto es = field.read(iter);
if (es != ErrorStatus::Success) {
return es;
}
return m_next.update(iter, len - field.length());
}The variable serialisation length encoding will be forced using some kind of
special option. It can be identified at compile time and
Tag Dispatch Idiom
can be used to select appropriate update functionality.
The caller, that requests protocol stack to serialise a message, must check
the error status value returned by the write() operation.
If it is ErrorStatus::UpdateRequired,
the caller must create random-access iterator to the already written buffer
and invoke update() function with it, to make sure the written information
is correct.
using ProtocolStack = ...;
ProtocolStack protStack;
ErrorStatus sendMessage(const Message& msg)
{
ProtocolStack::WriteIterator writeIter = ...;
auto es = protStack.write(msg, writeIter, bufLen);
if (es == ErrorStatus::UpdateRequired) {
auto updateIter = ...; // Random access iterator to written data
es = protStack.update(updateIter, ...);
}
return es;
}Defining Protocol Stack
To summarise the protocol transport wrapping subject, let’s define a custom protocol that wraps the message payload in the following way:
SYNC | SIZE | ID | PAYLOAD | CHECKSUMwhere:
-
All the fields are serialised using BIG endian.
-
SYNC - 2 bytes of synchronisation value to indicate beginning of the message, must be "0xab 0xcd"
-
SIZE - 2 bytes, length of remaining data, including checksum and not including SIZE field itself.
-
ID - 1 byte, numeric ID of the message.
-
PAYLOAD - any number of bytes, serialised message data
-
CHECKSUM - 2 bytes, arithmetic summary of all bytes starting (and including) from SIZE field and ending after PAYLOAD field.
The protocol layer should wrap one another in the following way:
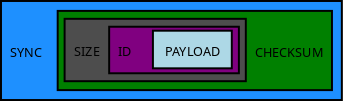
Please note, that CHECKSUM layer doesn’t wrap SYNC because synchronisation
prefix is not included in the checksum calculation.
Common Protocol Definitions
// BIG endian fields serialisation
using MyField = comms::Field<false>;
// Message IDs
enum MyMsgId : std::uint16_t
{
MyMsgId_ActualMessage1,
MyMsgId_ActualMessage2,
MyMsgId_ActualMessage3,
...
};
// Forward declaration of MyHandler handling class
class MyHandler;
// Message interface
// NOTE: write operation will write data into a vector using push_back() calls
using MyMessage =
comms::Message<
comms::option::MsgIdType<MyMsgId>
comms::option::ReadIterator<const std::uint8_t*>
comms::option::WriteIterator<std::back_insert_iterator<std::vector<std::uint8_t> > >,
comms::option::LengthInfoInterface,
comms::option::Handler<MyHandler>
>;
// Definition of the messages
class ActualMessage1Fields = std::tuple<...>;
template <typename TMessage>
class ActualMessage1 : public
comms::MessageBase<
comms::option::StaticNumIdImpl<MyMsgId_ActualMessage1>,
comms::option::FieldsImpl<ActualMessage1Fields>,
comms::option::DispatchImpl<ActualMessage1<TMessage>
>
{
};
class ActualMessage2Fields = std::tuple<...>;
template <typename TMessage>
class ActualMessage1 : public comms::MessageBase<...> {};
...
// Bundling all messages together
template <typename TMessage>
using AllMessages = std::tuple<
ActualMessage1<TMessage>,
ActualMessage2<TMessage>,
...
>;PAYLOAD Layer
using MyPayloadLayer = comms::MsgDataLayer<MyMessage>;ID Layer
using MyMsgIdField = comms::EnumValueField<MyField, MyMsgId>
using MyIdLayer = comms::MsgIdLayer<MyMsgIdField, AllMessages, MyPayloadLayer>;SIZE Layer
using MySizeField =
comms::IntValueField<
MyField,
std::uint16_t,
comms::option::NumValueSerOffset<sizeof(std::uint16_t)>
>;
using MySizeLayer = comms::MsgSizeLayer<MySizeField, MyIdLayer>;Please note, that SIZE field definition uses comms::option::NumValueSerOffset
option, which effectively adds 2 when size value is serialised, and
subtracts it when remaining length is deserialised. It must be done, because
SIZE value specifies number of remaining bytes, including the CHECKSUM
value at the end.
CHECKSUM Layer
using MyChecksumField = comms::IntValueField<MyField, std::uint16_t>;
using MyChecksumLayer = comms::ChecksumLayer<
MyChecksumField,
comms::BasicSum<std::uint16_t>
MySizeLayer
>;SYNC Layer
using MySyncField = comms::IntValueField<
MyField,
std::uint16_t,
comms::option::DefaultNumValue<0xabcd>
>;
using MySyncPrefix = comms::SyncPrefixLayer<SyncField, MyChecksumLayer>;Processing Loop
The outermost layer defines a full protocol stack. It should be typedef-ed to avoid any confusion:
using MyProtocolStack = MySyncPrefix;The processing loop may look like this:
// Protocol stack
MyProtocolStack protStack;
// Message handler object
MyHandler handler;
// Input data storage, the data received over I/O link is appended here
std::vector<std::uint8_t> inData;
void processData()
{
while (!inData.empty()) {
MyProtocolStack::ReadIterator readIter = &inData[0];
MyProtocolStack::MsgPtr msg;
auto es = protStack.read(msg, readIter, inData.size());
if (es == comms::ErrorStatus::NotEnoughData) {
// More data is required;
return;
}
if (es == comms::ErrorStatus::Success) {
assert(msgPtr); // Must hold the valid message object
msgPtr->dispatch(handler); // Process message, dispatch to handling function
// Erase consumed bytes from the buffer
auto consumedBytes =
std::distance(ProtocolStack::ReadIterator(&inData[0]), readIter);
inData.erase(inData.begin(), inData.begin() + consumedBytes);
continue;
}
// Some error occurred, pop only one first byte and try to process again
inData.erase(inData.begin());
}
}The processing loop above is not the most efficient one, but it demonstrates what needs to be done and how our generic library can be used to identify and process the received message.
Writing Message
The write logic is even simpler.
void sendMessage(const MyMessage& msg)
{
// Output buffer
std::vector<std::uint8_t> outData;
// Reserve enough space in output buffer
outData.reserve(protStack.length(msg));
auto writeIter = std::back_inserter(outData);
auto es = protStack.write(msg, writeIter, outData.max_size());
if (es == comms::ErrorStatus::UpdateRequired) {
auto updateIter = &outData[0];
es = protStack.update(updateIter, outData.size());
}
if (es != comms::ErrorStatus::Success) {
... // report error
return;
}
... // Send written data over I/O link
}Achievements
After all this effort of creating the generic comms library,
let’s summarise what has been achieved.
-
The communication protocol implementation becomes easy and straightforward process, using mostly declarative statements of classes and types definitions without unnecessary boilerplate code. The C++ compiler does all the dirty and boring work of generating the required code.
-
The default logic, provided by the library, can easily be extended and/or overridden using class inheritance and virtual functions.
-
The protocol implementation doesn’t enforce any restrictions on data structures being used, and as a result it can be reused in any system, including bare-metal ones.
-
There is no dependency on any specific I/O link and the way the data is being communicated.
-
The application level messages and transport data are completely independent, which allows usage of the same application level messages over different I/O links, which require different transport wrapping, at the same time.
Appendices
Appendices contain some extra code examples mentioned in this book and can be used for references.
Appendix A - tupleForEach
Implementation of tupleForEach() function. Namespace details contains some
helper classes.
namespace details
{
template <std::size_t TRem>
class TupleForEachHelper
{
public:
template <typename TTuple, typename TFunc>
static void exec(TTuple&& tuple, TFunc&& func)
{
using Tuple = typename std::decay<TTuple>::type;
static const std::size_t TupleSize = std::tuple_size<Tuple>::value;
static_assert(TRem <= TupleSize, "Incorrect parameters");
// Invoke function with current element
static const std::size_t Idx = TupleSize - TRem;
func(std::get<Idx>(std::forward<TTuple>(tuple)));
// Compile time recursion - invoke function with the remaining elements
TupleForEachHelper<TRem - 1>::exec(
std::forward<TTuple>(tuple),
std::forward<TFunc>(func));
}
};
template <>
class TupleForEachHelper(0)
{
public:
// Stop compile time recursion
template <typename TTuple, typename TFunc>
static void exec(TTuple&& tuple, TFunc&& func)
{
static_cast<void>(tuple);
static_cast<void>(func);
}
};
} // namespace details
template <typename TTuple, typename TFunc>
void tupleForEach(TTuple&& tuple, TFunc&& func)
{
using Tuple = typename std::decay<TTuple>::type;
static const std::size_t TupleSize = std::tuple_size<Tuple>::value;
details::TupleForEachHelper<TupleSize>::exec(
std::forward<TTuple>(tuple),
std::forward<TFunc>(func));
}Appendix B - tupleAccumulate
Implementation of tupleAccumulate() function. Namespace details contains some
helper classes.
namespace details
{
template <std::size_t TRem>
class TupleAccumulateHelper
{
public:
template <typename TTuple, typename TValue, typename TFunc>
static constexpr TValue exec(TTuple&& tuple, const TValue& value, TFunc&& func)
{
using Tuple = typename std::decay<TTuple>::type;
static_assert(TRem <= std::tuple_size<Tuple>::value, "Incorrect TRem");
return TupleAccumulateHelper<TRem - 1>::exec(
std::forward<TTuple>(tuple),
func(value, std::get<std::tuple_size<Tuple>::value - TRem>(std::forward<TTuple>(tuple))),
std::forward<TFunc>(func));
}
};
template <>
class TupleAccumulateHelper(0)
{
public:
template <typename TTuple, typename TValue, typename TFunc>
static constexpr TValue exec(TTuple&& tuple, const TValue& value, TFunc&& func)
{
return value;
}
};
} // namespace details
template <typename TTuple, typename TValue, typename TFunc>
constexpr TValue tupleAccumulate(TTuple&& tuple, const TValue& value, TFunc&& func)
{
using Tuple = typename std::decay<TTuple>::type;
return details::TupleAccumulateHelper<std::tuple_size<Tuple>::value>::exec(
std::forward<TTuple>(tuple),
value,
std::forward<TFunc>(func));
}Appendix C - tupleForEachFromUntil
Implementation of tupleAccumulate() function. Namespace details contains some
helper classes.
namespace details
{
template <std::size_t TRem, std::size_t TOff = 0>
class TupleForEachFromUntilHelper
{
public:
template <typename TTuple, typename TFunc>
static void exec(TTuple&& tuple, TFunc&& func)
{
using Tuple = typename std::decay<TTuple>::type;
static const std::size_t TupleSize = std::tuple_size<Tuple>::value;
static const std::size_t OffsetedRem = TRem + TOff;
static_assert(OffsetedRem <= TupleSize, "Incorrect parameters");
static const std::size_t Idx = TupleSize - OffsetedRem;
func(std::get<Idx>(std::forward<TTuple>(tuple)));
TupleForEachFromUntilHelper<TRem - 1, TOff>::exec(
std::forward<TTuple>(tuple),
std::forward<TFunc>(func));
}
};
template <std::size_t TOff>
class TupleForEachFromUntilHelper<0, TOff>
{
public:
template <typename TTuple, typename TFunc>
static void exec(TTuple&& tuple, TFunc&& func)
{
static_cast<void>(tuple);
static_cast<void>(func);
}
};
} // namespace details
// Invoke provided functor for every element in the tuple which indices
// are in range [TFromIdx, TUntilIdx).
template <std::size_t TFromIdx, std::size_t TUntilIdx, typename TTuple, typename TFunc>
void tupleForEachFromUntil(TTuple&& tuple, TFunc&& func)
{
using Tuple = typename std::decay<TTuple>::type;
static const std::size_t TupleSize = std::tuple_size<Tuple>::value;
static_assert(TFromIdx < TupleSize,
"The from index is too big.");
static_assert(TUntilIdx <= TupleSize,
"The until index is too big.");
static_assert(TFromIdx < TUntilIdx,
"The from index must be less than until index.");
static const std::size_t FieldsCount = TUntilIdx - TFromIdx;
details::TupleForEachFromUntilHelper<FieldsCount, TupleSize - TUntilIdx>::exec(
std::forward<TTuple>(tuple),
std::forward<TFunc>(func));
}Appendix D - tupleForEachType
Implementation of tupleForEachType() function. Namespace details contains some
helper classes.
namespace details
{
template <std::size_t TRem>
class TupleForEachTypeHelper
{
public:
template <typename TTuple, typename TFunc>
static void exec(TFunc&& func)
{
using Tuple = typename std::decay<TTuple>::type;
static const std::size_t TupleSize = std::tuple_size<Tuple>::value;
static_assert(TRem <= TupleSize, "Incorrect TRem");
static const std::size_t Idx = TupleSize - TRem;
using ElemType = typename std::tuple_element<Idx, Tuple>::type;
func.template operator()<ElemType>();
TupleForEachTypeHelper<TRem - 1>::template exec<TTuple>(
std::forward<TFunc>(func));
}
};
template <>
class TupleForEachTypeHelper(0)
{
public:
template <typename TTuple, typename TFunc>
static void exec(TFunc&& func)
{
// Nothing to do
}
};
} // namespace details
template <typename TTuple, typename TFunc>
void tupleForEachType(TFunc&& func)
{
using Tuple = typename std::decay<TTuple>::type;
static const std::size_t TupleSize = std::tuple_size<Tuple>::value;
details::TupleForEachTypeHelper<TupleSize>::template exec<Tuple>(
std::forward<TFunc>(func));
}Appendix E - AlignedUnion
Implementation of AlignedUnion type.
template <typename TType, typename... TTypes>
class AlignedUnion
{
using OtherStorage = typename AlignedUnion<TTypes...>::Type;
static const std::size_t OtherSize = sizeof(OtherStorage);
static const std::size_t OtherAlignment = std::alignment_of<OtherStorage>::value;
using FirstStorage = typename AlignedUnion<TType>::Type;
static const std::size_t FirstSize = sizeof(FirstStorage);
static const std::size_t FirstAlignment = std::alignment_of<FirstStorage>::value;
static const std::size_t MaxSize = FirstSize > OtherSize ? FirstSize : OtherSize;
static const std::size_t MaxAlignment =
FirstAlignment > OtherAlignment ? FirstAlignment : OtherAlignment;
public:
/// Type that has proper size and proper alignment to keep any of the
/// specified types
using Type = typename std::aligned_storage<MaxSize, MaxAlignment>::type;
};
template <typename TType>
class AlignedUnion<TType>
{
public:
using Type =
typename std::aligned_storage<sizeof(TType), std::alignment_of<TType>::value>::type;
};